행렬
 . 예를 들어, 는 행렬의 두 번째 행과 첫 번째 열에 있는 원소를 나타낸다.]]
. 예를 들어, 는 행렬의 두 번째 행과 첫 번째 열에 있는 원소를 나타낸다.]]
수학에서 행렬(: matrices)은 숫자 또는 기타 수학적 대상을 행과 열로 배열한 직사각형 배열로, 일반적으로 덧셈과 곱셈의 특정 성질을 만족한다.
예를 들어, \begin{bmatrix}1 & 9 & -13 \20 & 5 & -6 \end{bmatrix} 는 두 개의 행과 세 개의 열을 가진 행렬을 나타낸다. 이를 흔히 "2×3 행렬", 행렬, 또는 차원의 행렬이라고 한다.
선형대수학에서 행렬은 선형 사상으로 사용된다. 기하학에서 행렬은 기하학적 변환(예: 회전)과 좌표 변환에 사용된다. 수치해석에서 많은 계산 문제는 행렬 계산으로 환원하여 풀며, 이는 종종 거대한 차원의 행렬을 다루는 것을 포함한다. 행렬은 직접적으로 또는 기하학과 수치해석에서의 활용을 통해 대부분의 수학 및 과학 분야에서 사용된다.
정사각행렬, 즉 행과 열의 수가 같은 행렬은 행렬 이론에서 중요한 역할을 한다. 정사각행렬의 행렬식은 해당 행렬에 관련된 수로, 정사각행렬 연구의 근본이 된다. 예를 들어, 정사각행렬은 행렬식이 0이 아닐 때에만 역행렬이 존재하며, 정사각행렬의 고유값은 그 특성다항식 \det(\lambda I - A)의 근이다.
행렬 이론은 행렬의 연구에 초점을 맞춘 수학의 한 분야이다. 처음에는 선형대수학의 하위 분야였으나, 곧 그래프 이론, 대수학, 조합론 및 통계학과 관련된 주제를 포함하도록 성장하였다.
정의
행렬은 숫자(또는 기타 수학적 대상)의 직사각형 배열로, 이를 행렬의 "원소"라고 한다. 행렬에는 덧셈과 곱셈 같은 표준 연산이 적용된다. 가장 일반적으로, 체 F 위의 행렬은 의 원소로 이루어진 직사각형 배열이다. 실수 행렬과 복소수 행렬은 각각 원소가 실수 또는 복소수인 행렬이다. 더 일반적인 유형의 원소에 대해서는 아래에서 논의한다. 예를 들어, 다음은 실수 행렬이다: \mathbf{A} = \begin{bmatrix} -1.3 & 0.6 \ 20.4 & 5.5 \ 9.7 & -6.2 \end{bmatrix}.
행렬 안의 숫자(또는 기타 대상)를 원소 또는 성분이라고 한다. 행렬에서 수평 및 수직 방향으로 나열된 원소를 각각 행과 열이라고 한다.
크기
행렬의 크기는 행과 열의 수로 정의된다. (일반적인 의미에서) 행렬이 가질 수 있는 행과 열의 수에는 양의 정수인 한 제한이 없다. 개의 행과 개의 열을 가진 행렬을 행렬 또는 ×행렬이라고 하며, 여기서 과 을 그 '''크기'''라고 한다. 예를 들어, 위의 행렬 {\mathbf{A}}는 행렬이다.
하나의 행만 가진 행렬을 행 행렬 또는 행 벡터라고 하고, 하나의 열만 가진 행렬을 열 행렬 또는 열 벡터라고 한다. 행과 열의 수가 같은 행렬을 정사각행렬이라고 한다. 행이나 열(또는 둘 다)이 무한한 행렬을 무한 행렬이라고 한다. 컴퓨터 대수 프로그램과 같은 일부 맥락에서는 행이나 열이 없는 행렬, 즉 공행렬을 고려하는 것이 유용하다.[^1]
기본 연산
행렬에는 여러 가지 기본 연산을 적용할 수 있다. 전치와 부분행렬과 같은 일부 연산은 원소의 성질에 의존하지 않는다. 행렬 덧셈, 스칼라 곱셈, 행렬 곱셈, 행 연산과 같은 다른 연산들은 행렬 원소에 대한 연산을 포함하므로 행렬 원소가 수이거나 체 또는 환에 속해야 한다.
이 절에서는 행렬 원소가 고정된 환에 속한다고 가정하며, 이는 전형적으로 수의 체이다.
덧셈

행렬의 덧셈과 뺄셈은 같은 크기의 행렬을 필요로 하며, 원소별로 계산된다. 두 행렬의 합과 차는 다음과 같다:
\begin{align} (\bold A + \bold B){i, j} = \bold A{i,j} + \bold B_{i,j}, \quad 1 \leq i \leq m, \quad 1 \leq j \leq n. \ (\bold A - \bold B){i, j} = \bold A{i,j} - \bold B_{i,j}, \quad 1 \leq i \leq m, \quad 1 \leq j \leq n. \end{align}
예를 들어, \begin{bmatrix} 1 & 3 & 1 \ 1 & 0 & 0 \end{bmatrix} + \begin{bmatrix} 0 & 0 & 5 \ 7 & 5 & 0 \end{bmatrix}
\begin{bmatrix} 1+0 & 3+0 & 1+5 \ 1+7 & 0+5 & 0+0 \end{bmatrix}
\begin{bmatrix} 1 & 3 & 6 \ 8 & 5 & 0 \end{bmatrix}
수의 익숙한 성질이 행렬의 이러한 연산에도 확장된다: 예를 들어, 덧셈은 교환법칙이 성립하며, 즉 행렬의 합은 피가수의 순서에 의존하지 않는다: .
스칼라 곱셈
수 (이 맥락에서 스칼라라고도 부른다)와 행렬 의 곱 은 의 각 원소에 를 곱하여 계산된다: (c\bold A){i,j} = c \cdot \bold A{i,j} 이 연산을 스칼라 곱셈이라 부르지만, "스칼라 곱"이 흔히 "내적"의 동의어로 사용되므로, 혼동을 피하기 위해 그 결과를 "스칼라 곱"이라 부르지 않는다. 예를 들어: 2 \cdot \begin{bmatrix} 1 & 8 & -3 \ 4 & -2 & 5 \end{bmatrix}
\begin{bmatrix} 2 \cdot 1 & 2\cdot 8 & 2\cdot -3 \ 2\cdot 4 & 2\cdot -2 & 2\cdot 5 \end{bmatrix}
\begin{bmatrix} 2 & 16 & -6 \ 8 & -4 & 10 \end{bmatrix}
행렬의 뺄셈은 행렬의 덧셈과 에 의한 스칼라 곱셈의 합성과 일치한다: \mathbf A - \mathbf B = \mathbf A +(-1)\cdot \mathbf B
전치
행렬 의 전치는 행과 열을 뒤바꾸어 만든 행렬 (또는 또는 로도 표기)이다: \left( \bold A^{\rm T} \right){i,j} = \bold A{j,i}. 예를 들어: \begin{bmatrix} 1 & 2 & 3 \ 0 & -6 & 7 \end{bmatrix}^\mathrm{T} = \begin{bmatrix} 1 & 0 \ 2 & -6 \ 3 & 7 \end{bmatrix}
전치는 덧셈 및 스칼라 곱셈과 양립하며, 이는 과 로 표현된다. 마지막으로, .
행렬 곱셈
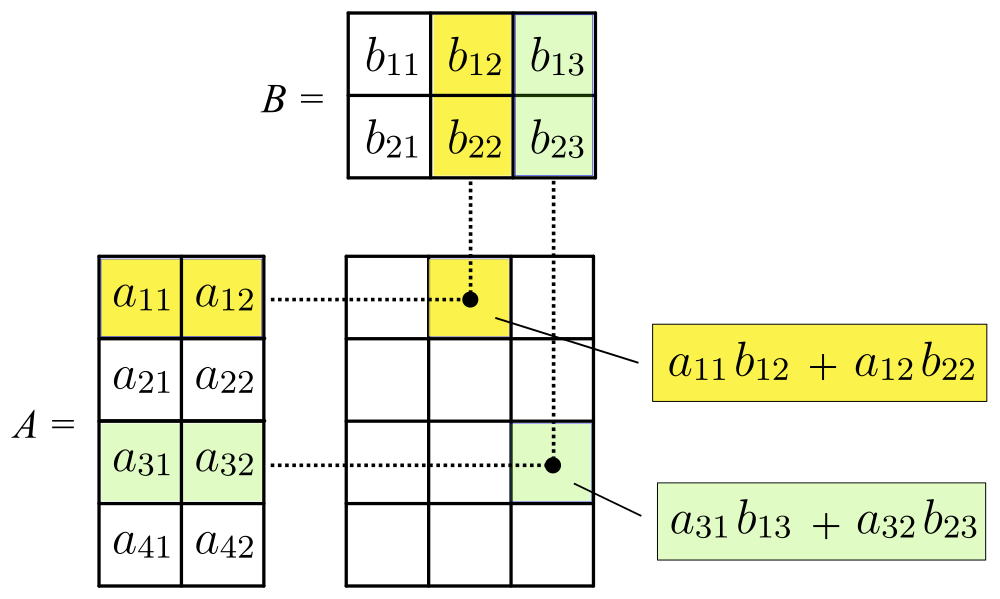
두 행렬의 곱셈은 각 행렬이 나타내는 선형 변환의 합성에 대응한다. 이는 왼쪽 행렬의 열의 수가 오른쪽 행렬의 행의 수와 같을 때에만 정의된다. 이 행렬이고 이 행렬이면, 그들의 행렬 곱 은 의 대응하는 행과 의 대응하는 열의 내적으로 원소가 주어지는 행렬이다: [\mathbf{AB}]{i,j} = a{i,1}b_{1,j} + a_{i,2}b_{2,j} + \cdots + a_{i,n}b_{n,j} = \sum_{r=1}^n a_{i,r}b_{r,j}, 여기서 이고 이다. 예를 들어, 곱에서 밑줄 친 원소 2340은 다음과 같이 계산된다 \begin{align} \begin{bmatrix} \underline{2} & \underline 3 & \underline 4 \ 1 & 0 & 0 \ \end{bmatrix}
\begin{bmatrix} 0 & \underline{1000} \ 1 & \underline{100} \ 0 & \underline{10} \ \end{bmatrix} &= \begin{bmatrix} 3 & \underline{2340} \ 0 & 1000 \ \end{bmatrix}. \end{align}
행렬 곱셈은 (결합법칙), 그리고 및 (좌분배법칙 및 우분배법칙)을 만족하며, 이는 행렬의 크기가 각 곱이 정의되도록 할 때 성립한다. 곱 이 정의되지 않은 채 가 정의될 수 있는데, 즉 과 이 각각 및 행렬이고 인 경우이다. 두 곱이 모두 정의되더라도 일반적으로 같을 필요는 없다. 즉: \bold{AB} \ne \bold{BA}.
다시 말해, 행렬 곱셈은 교환법칙이 성립하지 않으며, 이는 인수의 순서에 관계없이 곱이 같은 (유리수, 실수 또는 복소수) 수와 뚜렷이 대조된다. 서로 교환하지 않는 두 행렬의 예는 다음과 같다: \begin{bmatrix} 1 & 2\ 3 & 4\ \end{bmatrix}
\begin{bmatrix} 0 & 1\ 0 & 0\ \end{bmatrix}= \begin{bmatrix} 0 & 1\ 0 & 3\ \end{bmatrix}, 반면에 \begin{bmatrix} 0 & 1\ 0 & 0\ \end{bmatrix}
\begin{bmatrix} 1 & 2\ 3 & 4\ \end{bmatrix}= \begin{bmatrix} 3 & 4\ 0 & 0\ \end{bmatrix}.
위에서 설명한 일반적인 행렬 곱셈 외에, 아다마르 곱과 크로네커 곱과 같이 곱셈의 형태로 간주할 수 있는 덜 빈번하게 사용되는 행렬 연산도 존재한다. 이들은 실베스터 방정식과 같은 행렬 방정식을 풀 때 등장한다.
행 연산
행 연산에는 세 가지 유형이 있다:
- 행 덧셈, 즉 한 행을 다른 행에 더하는 것.
- 행 곱셈, 즉 한 행의 모든 원소에 0이 아닌 상수를 곱하는 것;
- 행 교환, 즉 행렬의 두 행을 교환하는 것; 이러한 연산은 가우스 소거법과 가우스-조르단 소거법을 이용하여 각각 연립일차방정식을 풀고 역행렬을 구하는 것을 포함하여 여러 방면에서 사용된다.
부분행렬
부분행렬은 행렬에서 임의의 행이나 열 또는 둘 다를 삭제하여 얻은 행렬이다. 예를 들어, 다음 행렬에서 3행과 2열을 제거하여 부분행렬을 구성할 수 있다: \mathbf{A}=\begin{bmatrix} 1 & \color{red}{2} & 3 & 4 \ 5 & \color{red}{6} & 7 & 8 \ \color{red}{9} & \color{red}{10} & \color{red}{11} & \color{red}{12} \end{bmatrix} \rightarrow \begin{bmatrix} 1 & 3 & 4 \ 5 & 7 & 8 \end{bmatrix}.
행렬의 소행렬식과 여인수는 특정 부분행렬의 행렬식을 계산하여 구한다.
주 부분행렬은 특정 행과 열을 제거하여 얻은 정사각 부분행렬이다. 그 정의는 저자마다 다르다. 일부 저자에 따르면, 주 부분행렬은 남아 있는 행 인덱스의 집합이 남아 있는 열 인덱스의 집합과 동일한 부분행렬이다. 다른 저자들은 주 부분행렬을 어떤 수 에 대해 처음 개의 행과 열이 남아 있는 것으로 정의하며; 이러한 유형의 부분행렬은 선행 주 부분행렬이라고도 불린다.[^4]
선형 방정식
행렬은 여러 선형 방정식, 즉 연립일차방정식을 간결하게 표기하고 다루는 데 사용할 수 있다. 예를 들어, 이 행렬이고, 이 변수 의 열벡터(즉, 행렬)이며, 가 열벡터라면, 행렬 방정식 \mathbf{Ax} = \mathbf{b} 은 다음의 연립일차방정식과 동치이다. \begin{align} a_{1,1}x_1 + a_{1,2}x_2 + &\cdots + a_{1,n}x_n = b_1 \ &\ \ \vdots \ a_{m,1}x_1 + a_{m,2}x_2 + &\cdots + a_{m,n}x_n = b_m \end{align}
행렬을 사용하면 모든 방정식을 개별적으로 나열하는 것보다 더 간결하게 풀 수 있다. 이고 방정식들이 독립적이라면, 다음과 같이 쓸 수 있다. \mathbf{x} = \mathbf{A}^{-1} \mathbf{b} 여기서 은 의 역행렬이다. 이 역행렬을 갖지 않는 경우, 해가 존재한다면 일반화 역행렬을 사용하여 구할 수 있다.
선형 변환

행렬과 행렬 곱셈은 선형 변환(선형 사상이라고도 함)과 관련지을 때 그 본질적인 특성이 드러난다. 실수 -by- 행렬 은 각 벡터 를 (행렬) 곱 로 대응시키는 선형 변환 \R^n \to \R^m을 유도하며, 이는 의 벡터이다. 역으로, 각 선형 변환 f: \R^n \to \R^m은 유일한 -by- 행렬 로부터 생성된다: 구체적으로, 의 -번째 성분은 의 번째 좌표이며, 여기서 은 번째 위치에 이 있고 나머지는 인 단위 벡터이다. 행렬 은 선형 사상 를 나타낸다고 하며, 은 의 변환 행렬이라 불린다.
예를 들어, 행렬
\mathbf{A} = \begin{bmatrix} a & c\b & d \end{bmatrix}
은 단위 정사각형을 꼭짓점이 , , , 인 평행사변형으로 변환하는 것으로 볼 수 있다. 오른쪽에 그려진 평행사변형은 에 각각의 열벡터 , , , 를 차례로 곱하여 얻어진다. 이 벡터들은 단위 정사각형의 꼭짓점을 정의한다. 다음 표는 여러 개의 실수 행렬과 그에 대응하는 의 선형 사상을 보여준다. 원본은 격자와 도형으로 대응된다. 원점 은 검은 점으로 표시되어 있다.
{| class="wikitable" style="text-align:center; margin:1em auto 1em auto;"
|-
| m = 1.25인 수평 전단
| 수직축에 대한 반사
| r = 3/2인 압축 사상
| 3/2배 크기 조정
|/6 = 30° 회전
|-
| \begin{bmatrix}
1 & 1.25 \
0 & 1
\end{bmatrix}
| \begin{bmatrix}
-1 & 0 \
0 & 1
\end{bmatrix}
| \begin{bmatrix}
\frac{3}{2} & 0 \
0 & \frac{2}{3}
\end{bmatrix}
|\begin{bmatrix}
\frac{3}{2} & 0 \
0 & \frac{3}{2}
\end{bmatrix}
|\begin{bmatrix}
\cos\left(\frac{\pi}{6}\right) & -\sin\left(\frac{\pi}{6}\right) \
\sin\left(\frac{\pi}{6}\right) & \cos\left(\frac{\pi}{6}\right)
\end{bmatrix}
|-
| width="20%" |

| width="20%" |

| width="20%" |

| width="20%" |

| width="20%" |

|}
행렬과 선형 사상 사이의 일대일 대응 관계에서, 행렬 곱셈은 사상의 합성에 대응한다:[^5] -by- 행렬 이 또 다른 선형 사상 를 나타낸다면, 합성 은 로 표현되는데, 이는 다음과 같기 때문이다. (g \circ f)(\bold x) = g(f(\bold x)) = g(\bold{Ax}) = \bold B(\bold {Ax}) = (\bold{BA}) \bold x.
마지막 등식은 앞서 언급한 행렬 곱셈의 결합법칙으로부터 따라온다.
행렬 의 계수(rank)는 행렬의 선형 독립인 행벡터의 최대 개수이며, 이는 선형 독립인 열벡터의 최대 개수와 같다. 이는 동치적으로 이 행렬이 나타내는 선형 사상의 상(image)의 차원이다. 계수-퇴화차수 정리는 행렬의 핵(kernel)의 차원과 계수의 합이 행렬의 열의 수와 같다고 말한다.
정사각행렬
정사각행렬은 행과 열의 수가 같은 행렬이다. -by- 행렬은 차수 의 정사각행렬이라고 한다. 같은 차수의 두 정사각행렬은 덧셈과 곱셈이 가능하다. 항목 은 정사각행렬의 주대각선을 구성한다. 이들은 행렬의 왼쪽 위 모서리에서 오른쪽 아래 모서리로 이어지는 가상의 선 위에 놓인다.
주어진 차원의 정사각행렬은 비가환환을 이루며, 이는 비가환환의 가장 대표적인 예 중 하나이다.
주요 유형
{| class="wikitable" style="float:right; margin:0ex 0ex 2ex 2ex;" |- ! 이름 !! 인 경우의 예 |- | 대각행렬 || style="text-align:center;" | \begin{bmatrix} a_{11} & 0 & 0 \ 0 & a_{22} & 0 \ 0 & 0 & a_{33} \ \end{bmatrix} |- | 하삼각행렬 || style="text-align:center;" | \begin{bmatrix} a_{11} & 0 & 0 \ a_{21} & a_{22} & 0 \ a_{31} & a_{32} & a_{33} \ \end{bmatrix} |- | 상삼각행렬 || style="text-align:center;" | \begin{bmatrix} a_{11} & a_{12} & a_{13} \ 0 & a_{22} & a_{23} \ 0 & 0 & a_{33} \ \end{bmatrix} |}
대각행렬과 삼각행렬
의 주대각선 아래의 모든 항목이 0이면, 은 상삼각행렬이라고 한다. 마찬가지로, 의 주대각선 위의 모든 항목이 0이면, 은 하삼각행렬이라고 한다. 주대각선 바깥의 모든 항목이 0이면, 은 대각행렬이라고 한다.
단위행렬
크기 의 단위행렬 은 주대각선 위의 모든 원소가 이고 나머지 모든 원소가 인 -by- 행렬이다. 예를 들어, \begin{align} \mathbf{I}_1 &= \begin{bmatrix} 1 \end{bmatrix}, \[4pt] \mathbf{I}_2 &= \begin{bmatrix} 1 & 0 \ 0 & 1 \end{bmatrix}, \[4pt] \vdots& \[4pt] \mathbf{I}_n &= \begin{bmatrix} 1 & 0 & \cdots & 0 \ 0 & 1 & \cdots & 0 \ \vdots & \vdots & \ddots & \vdots \ 0 & 0 & \cdots & 1 \end{bmatrix} \end{align} 이것은 차수 의 정사각행렬이며, 대각행렬의 특수한 형태이기도 하다. 단위행렬과의 곱셈은 행렬을 변화시키지 않으므로 단위행렬이라고 불린다: \bold{AI}_n = \bold I_m \bold A = \bold A 임의의 -by- 행렬 에 대해 성립한다.
단위행렬의 스칼라 배는 스칼라 행렬이라고 한다.
대칭행렬 또는 반대칭행렬
자신의 전치행렬과 같은 정사각행렬 , 즉 인 행렬은 대칭행렬이다. 반대로, 이 자신의 전치행렬의 음수와 같은 경우, 즉 이면, 은 반대칭행렬이다. 복소행렬에서 대칭의 개념은 흔히 에르미트 행렬로 대체되며, 이는 를 만족한다. 여기서 별표는 행렬의 켤레전치, 즉 복소 켤레의 전치를 나타낸다.
스펙트럼 정리에 의해, 실수 대칭행렬과 복소 에르미트 행렬은 고유기저를 가진다. 즉, 모든 벡터는 고유벡터의 선형결합으로 표현할 수 있다. 두 경우 모두 모든 고유값은 실수이다. 이 정리는 무한히 많은 행과 열을 가진 행렬과 관련된 무한차원 상황으로 일반화할 수 있다.
가역행렬과 그 역행렬
정사각행렬 이 다음을 만족하는 행렬 가 존재하면 가역 또는 비특이라고 한다: \bold{AB} = \bold{BA} = \bold I_n, 여기서 은 주대각선의 각 항목이 이고 나머지가 인 단위행렬이다. 가 존재하면, 이는 유일하며 의 역행렬이라고 하고, 로 표기한다.
정사각행렬이 가역인지 판별하고, 가역일 경우 그 역행렬을 계산하는 알고리즘은 많이 있다. 가장 오래된 것 중 하나로 여전히 널리 사용되는 것은 가우스 소거법이다.
정치행렬
{| class="wikitable" style="float:right; text-align:center; margin:0ex 0ex 2ex 2ex;"
|-
! 양의 정치행렬 !! 부정치행렬
|-
| \begin{bmatrix}
\frac{1}{4} & 0 \
0 & 1 \
\end{bmatrix}
| \begin{bmatrix}
\frac{1}{4} & 0 \
0 & -\frac{1}{4}
\end{bmatrix}
|-
| Q(x,y)= \frac{1}{4}x^2+y^2
| Q(x,y)= \frac{1}{4}x^2-\frac{1}{4}y^2
|-
|
 Q(x,y)= 1인 점들 (타원)
|
Q(x,y)= 1인 점들 (타원)
|
 Q(x,y)= 1인 점들 (쌍곡선)
|}
대칭 실수행렬 이 관련된 이차형식
f(\bold x) = \bold x^{\rm T} \bold{Ax}
이 에서 모든 영이 아닌 벡터 에 대해 양의 값을 가지면 양의 정치라고 한다. 이 음의 값만 산출하면 은 음의 정치이고, 이 음의 값과 양의 값을 모두 산출하면 은 부정치이다. 이차형식 이 음이 아닌 값만 산출하면(양수 또는 영), 대칭행렬은 양의 반정치(또는 음이 아닌 값만이면 음의 반정치)라고 한다. 따라서 행렬이 양의 반정치도 아니고 음의 반정치도 아닌 경우에 정확히 부정치이다.
Q(x,y)= 1인 점들 (쌍곡선)
|}
대칭 실수행렬 이 관련된 이차형식
f(\bold x) = \bold x^{\rm T} \bold{Ax}
이 에서 모든 영이 아닌 벡터 에 대해 양의 값을 가지면 양의 정치라고 한다. 이 음의 값만 산출하면 은 음의 정치이고, 이 음의 값과 양의 값을 모두 산출하면 은 부정치이다. 이차형식 이 음이 아닌 값만 산출하면(양수 또는 영), 대칭행렬은 양의 반정치(또는 음이 아닌 값만이면 음의 반정치)라고 한다. 따라서 행렬이 양의 반정치도 아니고 음의 반정치도 아닌 경우에 정확히 부정치이다.
대칭행렬이 양의 정치일 필요충분조건은 모든 고유값이 양수인 것, 즉 행렬이 양의 반정치이면서 가역인 것이다. 오른쪽 표는 2-by-2 행렬의 두 가지 경우를 보여준다. 대각행렬의 고유값은 단순히 대각선을 따라 있는 항목들이므로, 이 예시들에서 고유값은 행렬 자체에서 직접 읽을 수 있다. 첫 번째 행렬은 두 고유값이 모두 양수이고, 두 번째 행렬은 하나가 양수이고 다른 하나가 음수이다.
두 개의 다른 벡터를 입력으로 허용하면 에 관련된 쌍선형형식을 얻는다: B_{\bold A} (\bold x, \bold y) = \bold x^{\rm T} \bold{Ay}.
복소행렬의 경우, 대칭행렬, 이차형식, 쌍선형형식, 전치 를 각각 에르미트 행렬, 에르미트 형식, 반쌍선형형식, 켤레전치 로 대체하면 같은 용어와 결과가 적용된다.
직교행렬
직교행렬은 열과 행이 직교 단위벡터(즉, 정규직교벡터)인 실수 항목의 정사각행렬이다. 동치적으로, 행렬 의 전치가 역행렬과 같으면 직교행렬이다: \mathbf{A}^\mathrm{T}=\mathbf{A}^{-1}, , 이는 다음을 수반한다: \mathbf{A}^\mathrm{T} \mathbf{A} = \mathbf{A} \mathbf{A}^\mathrm{T} = \mathbf{I}_n, 여기서 은 크기 의 단위행렬이다.
직교행렬 은 반드시 가역이고(역행렬 ), 유니터리()이며, 정규()이다. 임의의 직교행렬의 행렬식은 또는 이다. 특수직교행렬은 행렬식이 인 직교행렬이다. 선형변환으로서, 행렬식이 인 모든 직교행렬은 반사가 없는 순수한 회전이며, 즉 변환이 변환된 구조의 방향을 보존한다. 반면 행렬식이 인 모든 직교행렬은 방향을 역전시키며, 즉 순수한 반사와 (영일 수 있는) 회전의 합성이다. 단위행렬은 행렬식이 이며 각도 영의 순수한 회전이다.
직교행렬의 복소수 대응물은 유니터리 행렬이다.
주요 연산
대각합
정사각행렬 의 대각합 은 대각 항목의 합이다. 위에서 언급했듯이 행렬 곱셈은 교환법칙이 성립하지 않지만, 두 행렬의 곱의 대각합은 인수의 순서에 무관하다: \operatorname{tr}(\mathbf{AB}) =\operatorname{tr}(\mathbf{BA}). 이는 행렬 곱셈의 정의로부터 바로 도출된다: \operatorname{tr}(\mathbf{AB}) = \sum_{i=1}^m \sum_{j=1}^n a_{ij} b_{ji} = \operatorname{tr}(\mathbf{BA}). 이로부터 셋 이상의 행렬의 곱의 대각합은 행렬의 순환 치환에 대해 불변이다. 그러나 이는 일반적으로 임의의 치환에는 적용되지 않는다. 예를 들어, 은 일반적으로 성립하지 않는다. 또한, 행렬의 대각합은 그 전치행렬의 대각합과 같다. 즉, \operatorname{tr}(\bold A) = \operatorname{tr}(\bold A^{\rm T}).
행렬식
 , 반시계 방향의 벡터를 시계 방향으로 바꾸므로.]]
, 반시계 방향의 벡터를 시계 방향으로 바꾸므로.]]
정사각행렬 의 행렬식( 또는 로 표기)은 행렬의 특정 성질을 부호화하는 수이다. 행렬이 가역일 필요충분조건은 행렬식이 영이 아닌 것이다. 행렬식의 절댓값은 단위 정사각형(또는 정육면체)의 상의 넓이( 에서) 또는 부피( 에서)와 같고, 부호는 대응하는 선형사상의 방향에 해당한다: 행렬식이 양수일 필요충분조건은 방향이 보존되는 것이다.
행렬의 행렬식은 다음과 같다:[^2] \det \begin{bmatrix}a&b\c&d\end{bmatrix} = ad-bc. 행렬의 행렬식은 여섯 개의 항을 포함한다(사뤼스 법칙). 더 복잡한 라이프니츠 공식은 이 두 공식을 모든 차원으로 일반화한다.
정사각행렬의 곱의 행렬식은 각 행렬식의 곱과 같다: \det(\bold{AB}) = \det(\bold A) \cdot \det(\bold B), 또는 대안적 표기법을 사용하면: |\bold{AB}| = |\bold A| \cdot |\bold B|. 임의의 행의 배수를 다른 행에 더하거나, 임의의 열의 배수를 다른 열에 더해도 행렬식은 변하지 않는다. 두 행 또는 두 열을 교환하면 행렬식에 을 곱하는 효과가 있다. 이러한 연산을 사용하면 임의의 행렬을 하삼각(또는 상삼각)행렬로 변환할 수 있으며, 그러한 행렬의 행렬식은 주대각선 위 항목들의 곱과 같다. 이것은 임의의 행렬의 행렬식을 계산하는 방법을 제공한다. 마지막으로, 라플라스 전개는 행렬식을 소행렬식, 즉 더 작은 행렬의 행렬식으로 표현한다. 이 전개는 행렬식의 재귀적 정의( 행렬의 행렬식, 즉 유일한 항목을 시작 사례로 삼거나, 심지어 행렬의 행렬식을 시작 사례로 삼는)에 사용할 수 있으며, 이는 라이프니츠 공식과 동치임을 보일 수 있다. 행렬식은 크래머 법칙을 사용하여 연립일차방정식을 풀 수 있으며, 여기서 두 관련 정사각행렬의 행렬식의 나눗셈이 연립방정식의 각 변수의 값과 같다.
고유값과 고유벡터
수 \lambda와 영이 아닌 벡터 가 \mathbf{A} \mathbf{v} = \lambda \mathbf{v} 를 만족하면, 이를 각각 의 고유값과 고유벡터라고 한다.[^6] 수 이 행렬 의 고유값일 필요충분조건은 이 가역이 아닌 것이며, 이는 다음과 동치이다: \det(\mathbf{A}-\lambda \mathbf{I}) = 0. 행렬식 의 평가로 주어지는 부정원 에 대한 다항식 를 의 특성다항식이라고 한다. 이것은 차수 의 최고차 계수가 1인 다항식이다. 따라서 다항식 방정식 은 최대 개의 서로 다른 해, 즉 행렬의 고유값을 가진다. 의 항목이 실수라 하더라도 고유값은 복소수일 수 있다. 케일리-해밀턴 정리에 의하면, , 즉 행렬 자체를 특성다항식에 대입한 결과는 영행렬이 된다.
계산적 측면
행렬 계산은 종종 다양한 기법으로 수행할 수 있다. 많은 문제가 직접 알고리즘과 반복적 접근법 양쪽 모두로 풀릴 수 있다. 예를 들어, 정사각행렬의 고유벡터는 이 무한대로 갈 때 고유벡터로 수렴하는 벡터 수열을 구함으로써 얻을 수 있다.
각 특정 문제에 가장 적합한 알고리즘을 선택하려면, 사용 가능한 모든 알고리즘의 효율성과 정밀도를 모두 판별하는 것이 중요하다. 이러한 사항을 연구하는 분야를 수치 선형대수학이라 한다. 다른 수치적 상황과 마찬가지로, 두 가지 주요 측면은 알고리즘의 복잡도와 수치적 안정성이다.
알고리즘의 복잡도를 결정한다는 것은 예를 들어 행렬의 곱셈과 같은 특정 알고리즘을 수행하기 위해 스칼라의 덧셈과 곱셈 같은 기본 연산이 얼마나 많이 필요한지에 대한 상한이나 추정치를 구하는 것을 의미한다. 위에 주어진 정의를 사용하여 두 개의 -by- 행렬의 행렬곱을 계산하려면 번의 곱셈이 필요한데, 이는 곱의 개 항목 각각에 대해 번의 곱셈이 필요하기 때문이다. 슈트라센 알고리즘은 이 "단순한" 알고리즘보다 우수한 성능을 보이며, 단지 번의 곱셈만 필요로 한다. 이론적으로는 더 빠르지만 실용적이지 않은 행렬 곱셈 알고리즘이 개발되었으며, 병렬 알고리즘이나 맵리듀스와 같은 분산 계산 시스템을 활용한 속도 향상 방법도 개발되었다.
많은 실제 상황에서는 관련된 행렬에 대한 추가 정보가 알려져 있다. 중요한 경우는 희소행렬, 즉 대부분의 항목이 0인 행렬에 관한 것이다. 예를 들어, 희소행렬 에 대한 선형 방정식계 를 푸는 데 특별히 적합한 알고리즘이 있으며, 켤레 기울기법이 그 예이다.
알고리즘이 수치적으로 안정적이라는 것은, 대략적으로 말해, 입력값의 작은 편차가 결과에서 큰 편차를 초래하지 않는다는 것을 의미한다. 예를 들어, 수반행렬을 계산하여 행렬의 역행렬을 구할 수 있다: \bold A^{-1} = \operatorname{adj}(\bold A) / \det(\bold A). 그러나 행렬의 행렬식이 매우 작으면 이 방법은 상당한 반올림 오차를 초래할 수 있다. 행렬의 노름은 행렬의 역행렬 계산과 같은 선형대수 문제의 조건수를 파악하는 데 사용할 수 있다.
분해
행렬을 더 쉽게 다룰 수 있는 형태로 변환하는 여러 가지 방법이 있다. 이러한 방법들은 일반적으로 행렬 분해 또는 행렬 인수분해 기법이라고 불린다. 이 기법들은 계산을 더 쉽게 만들 수 있기 때문에 관심의 대상이 된다.
LU 분해는 행렬을 하삼각행렬()과 상삼각행렬()의 곱으로 인수분해한다. 이 분해가 계산되면, 전진 대입과 후진 대입이라는 간단한 기법을 통해 선형 시스템을 더 효율적으로 풀 수 있다. 마찬가지로, 삼각행렬의 역행렬은 알고리즘적으로 계산하기가 더 쉽다. 가우스 소거법은 유사한 알고리즘으로, 임의의 행렬을 행 사다리꼴 형태로 변환한다. 두 방법 모두 행렬에 적절한 기본행렬을 곱하는 방식으로 진행되며, 이는 행이나 열을 치환하거나 한 행의 배수를 다른 행에 더하는 것에 해당한다. 특이값 분해(SVD)는 임의의 행렬 을 의 곱으로 표현하는데, 여기서 와 는 유니터리 행렬이고 는 대각행렬이다.

고유값 분해 또는 대각화는 을 의 곱으로 표현하는데, 여기서 는 대각행렬이고 는 적절한 가역행렬이다. 이 만약 이러한 형태로 쓸 수 있다면, 대각화 가능하다고 한다. 더 일반적으로, 모든 행렬에 적용할 수 있는 조르당 분해는 행렬을 조르당 표준형으로 변환한다. 즉, 오른쪽에 보이는 것처럼 의 고유값 에서 까지가 주대각선에 놓이고, 주대각선 바로 위에 1과 같은 값이 올 수 있는 행렬이다. 고유값 분해가 주어지면, 의 제곱(즉, 번 반복된 행렬 곱셈)은 다음과 같이 계산할 수 있다. \bold A^n = (\bold{VDV}^{-1})^{n} = \bold{VDV}^{-1} \bold{VDV}^{-1} \ldots \bold{VDV}^{-1} = \bold{VD}^n \bold V^{-1} 그리고 대각행렬의 거듭제곱은 대각 성분의 해당 거듭제곱을 취하여 계산할 수 있으며, 이는 대신 거듭제곱을 수행하는 것보다 훨씬 쉽다. 이를 통해 행렬 지수 함수 를 계산할 수 있는데, 이는 선형 미분방정식을 풀 때, 행렬 로그 및 행렬의 제곱근을 구할 때 자주 필요하다. 수치적으로 조건이 나쁜 상황을 피하기 위해 슈어 분해와 같은 추가 알고리즘을 사용할 수 있다.
추상 대수적 측면과 일반화
행렬은 다양한 방식으로 일반화할 수 있다. 추상대수학에서는 보다 일반적인 체(field)나 환(ring)의 원소를 성분으로 하는 행렬을 다루며, 선형대수학에서는 행렬의 성질을 선형 사상의 개념으로 체계화한다. 무한히 많은 열과 행을 가진 행렬도 고려할 수 있다. 또 다른 확장은 텐서로, 이는 숫자의 고차원 배열로 볼 수 있으며, 벡터가 흔히 숫자의 수열로 실현되고 행렬이 직사각형 또는 2차원 숫자 배열인 것과 대비된다. 특정 조건을 만족하는 행렬들은 행렬군이라 알려진 군을 이루는 경향이 있다. 마찬가지로 특정 조건 하에서 행렬들은 행렬환이라 알려진 환을 이룬다. 행렬의 곱은 일반적으로 교환법칙이 성립하지 않지만, 특정 행렬들은 행렬체(matrix field)라 불리는 체를 이루기도 한다. (다만 "행렬체"라는 용어는 모호하며, 어떤 공간의 점을 행렬에 연속적으로 대응시키는 특정 형태의 물리적 장(field)을 지칭하기도 한다.) 일반적으로, 임의의 환 위의 행렬과 그 곱셈은 범주—해당 환 위의 행렬의 범주—에서의 사상(arrow)과 사상의 합성으로 표현할 수 있다. 이 범주의 대상은 행렬의 차원을 나타내는 자연수이다.
체 또는 환의 원소를 성분으로 하는 행렬
이 문서는 실수 또는 복소수를 성분으로 하는 행렬에 초점을 맞춘다. 그러나 행렬은 실수나 복소수보다 훨씬 더 일반적인 유형의 성분으로 고려할 수 있다. 일반화의 첫 번째 단계로서, 덧셈, 뺄셈, 곱셈, 나눗셈 연산이 정의되고 잘 작동하는 집합인 임의의 체를 또는 대신 사용할 수 있는데, 예를 들어 유리수나 유한체가 그것이다. 예를 들어, 부호화 이론에서는 유한체 위의 행렬을 활용한다. 고유값을 고려할 때, 이들은 다항식의 근이므로 행렬 성분의 체보다 더 큰 체에서만 존재할 수 있다. 예컨대, 실수 성분 행렬의 경우 고유값이 복소수일 수 있다. 행렬의 성분을 더 큰 체의 원소로 재해석할 수 있는 가능성(예를 들어, 실수 행렬을 성분이 모두 실수인 복소 행렬로 보는 것)은 각 정사각행렬이 완전한 고유값 집합을 가지는 것으로 간주할 수 있게 해준다. 또는 처음부터 과 같은 대수적으로 닫힌 체의 성분만을 가진 행렬만 고려할 수도 있다.
다항식을 성분으로 하는 행렬, 그리고 보다 일반적으로 환 의 원소를 성분으로 하는 행렬은 수학에서 널리 사용된다. 환은 나눗셈 연산이 반드시 존재할 필요가 없다는 점에서 체보다 더 일반적인 개념이다. 행렬의 덧셈과 곱셈 연산은 이 설정에서도 동일하게 확장된다. 환 위의 모든 정사각 행렬의 집합 (또한 으로 표기)은 행렬환이라 불리는 환으로, 왼쪽 -가군의 자기 준동형환과 동형이다. 환 이 가환환, 즉 곱셈이 교환법칙을 만족하는 환이면, 환 은 위의 결합 대수이기도 하다. 가환환 위의 정사각행렬의 행렬식은 여전히 라이프니츠 공식을 사용하여 정의할 수 있다; 이러한 행렬은 행렬식이 에서 가역일 때에만 가역이며, 이는 모든 영이 아닌 원소가 가역인 체 위에서의 상황을 일반화한 것이다. 초환(superring) 위의 행렬은 초행렬(supermatrix)이라 한다.
행렬의 모든 성분이 항상 같은 환에 속하는 것은 아니며—심지어 어떤 환에도 속하지 않을 수도 있다. 특수하지만 흔한 경우가 블록 행렬로, 이는 성분 자체가 행렬인 행렬로 볼 수 있다. 이 성분들은 정사각행렬일 필요가 없으므로 어떤 환의 원소일 필요도 없다; 그러나 이들을 곱하기 위해서는 크기가 특정 조건을 충족해야 한다: 전체 곱을 형성할 때 곱해지는 각 부분행렬 쌍은 호환되는 크기를 가져야 한다.
선형 사상과의 관계
위에서 설명한 바와 같이, 선형 사상 \R^n \to \R^m은 행 열 행렬과 동치이다. 보다 일반적으로, 유한 차원 벡터 공간 사이의 임의의 선형 사상 은 행렬 로 기술할 수 있는데, 이를 위해 의 기저 와 의 기저 를 선택한 후( 은 의 차원이고 은 의 차원), 다음이 성립하도록 한다: f(\mathbf{v}j) = \sum{i=1}^m a_{i,j} \mathbf{w}_i\qquad\mbox{for}\ j=1,\ldots,n. 다시 말해, 의 번째 열은 의 상(image)을 의 기저 벡터 로 표현한 것이다; 따라서 이 관계는 행렬의 성분을 유일하게 결정한다. 행렬은 기저의 선택에 따라 달라지는데: 다른 기저를 선택하면 다른, 그러나 동치인 행렬을 얻는다. 위에서 언급한 많은 구체적 개념들은 이러한 관점에서 재해석될 수 있으며, 예를 들어 전치행렬 은 쌍대 기저에 관하여 로 주어지는 선형 사상의 전치를 기술한다.
이러한 성질은 더 자연스럽게 재진술할 수 있다: 체 k의 원소를 성분으로 하고 곱셈을 합성으로 하는 행렬의 범주는, 이 체 위의 유한 차원 벡터 공간과 선형 사상의 범주와 동치이다.
보다 일반적으로, 행렬의 집합은 임의의 단위원을 가진 환 에 대해 자유 가군 과 사이의 -선형 사상을 나타내는 데 사용할 수 있다. 일 때 이들 사상의 합성이 가능하며, 이로부터 의 자기 준동형환을 나타내는 정사각행렬의 행렬환이 생긴다.
행렬군
군은 대상의 집합과 이항 연산—즉, 임의의 두 대상을 결합하여 세 번째 대상을 만드는 연산—으로 이루어진 수학적 구조로, 특정 조건을 만족해야 한다. 가역 행렬을 대상으로 하고 행렬 곱셈을 군 연산으로 하는 군을 차수 의 행렬군이라 한다. 이러한 모든 행렬군은 모든 가역 행렬의 군, 즉 차수 의 일반선형군의 부분군이다(즉, 그 안에 포함된 더 작은 군이다).
행렬의 곱과 역행렬 연산에 대해 보존되는 정사각행렬의 임의의 성질을 이용하여 행렬군을 정의할 수 있다. 예를 들어, 행렬식이 인 모든 행렬의 집합은 차수 의 특수선형군이라 불리는 군을 이룬다. 다음 조건으로 결정되는 직교 행렬의 집합 \bold M^{\rm T} \bold M = \bold I, 은 직교군을 이룬다. 모든 직교 행렬의 행렬식은 또는 이다. 행렬식이 인 직교 행렬은 특수직교군이라 불리는 군을 이룬다.
모든 유한군은 행렬군과 동형인데, 이는 대칭군의 정칙 표현을 고려하면 알 수 있다. 일반적인 군은 비교적 잘 이해되어 있는 행렬군을 이용하여 표현론을 통해 연구할 수 있다.[^7]
무한 행렬
무한히 많은 행과 열을 가진 행렬도 고려할 수 있다.^8 위에서 소개한 기본 연산들은 이 경우에도 동일한 방식으로 정의된다. 그러나 행렬 곱셈과 이로부터 파생되는 모든 연산은 특정 행렬로 제한할 때에만 의미가 있는데, 이는 위의 행렬 곱 정의에 등장하는 합이 무한히 많은 항을 포함하기 때문이다. 이 문제를 우회하는 쉬운 방법은 모든 행(또는 열)에 유한 개의 영이 아닌 항만 포함하는 유한형 행렬로 제한하는 것이다. 유한한 경우(위 참조)에서 행렬이 선형 사상을 기술하는 것처럼, 무한 행렬은 힐베르트 공간 위의 작용소를 기술하는 데 사용할 수 있으며, 이 경우 수렴성과 연속성의 문제가 발생한다. 그러나 행렬의 명시적 관점은 문제를 오히려 불명확하게 만드는 경향이 있으며,[^9] 대신 행렬을 (유한한 경우에서처럼) 선형 사상에 연관시키되 추가적인 수렴성 및 연속성 제약 조건을 부과함으로써, 함수해석학의 추상적이고 더 강력한 도구가 사용된다.
빈 행렬
빈 행렬은 행의 수 또는 열의 수(또는 둘 다)가 0인 행렬이다.^10 빈 행렬은 특정 재귀적 구성의 유용한 기저 사례가 될 수 있으며, 영벡터 공간에 관련된 사상을 다루는 데 도움이 될 수 있다. 예를 들어, 이 행렬이고 가 행렬이면, 은 3차원 공간 에서 자기 자신으로의 영사상에 해당하는 영행렬이며, 은 행렬이다. 빈 행렬에 대한 공통된 표기법은 없지만, 대부분의 컴퓨터 대수 시스템에서는 빈 행렬을 생성하고 연산할 수 있다.[^11] 행렬의 행렬식은 관례적으로 1로 정의하며, 이는 행렬식의 라이프니츠 공식에서 나타나는 공곱(empty product)과 일치한다. 이 값은 또한 행렬식을 더 작은 행렬의 행렬식과 관련짓는 데나노-자코비 항등식의 경우와의 일관성을 위해서도 필요하다.
반환의 원소를 성분으로 하는 행렬
반환은 환과 유사하지만, 원소가 반드시 덧셈에 대한 역원을 가질 필요가 없으므로 자유롭게 뺄셈을 할 수 없다. 환의 원소를 성분으로 하는 행렬의 덧셈과 곱셈의 정의는 반환의 원소를 성분으로 하는 행렬에도 수정 없이 적용된다. 반환의 원소를 성분으로 하는 고정된 크기의 행렬은 덧셈 하에서 가환 모노이드 \operatorname{Mat}(m,n;R)를 이룬다. 반환의 원소를 성분으로 하는 고정된 크기의 정사각행렬은 덧셈과 곱셈 하에서 반환 \operatorname{Mat}(n;R)을 이룬다.
가환 반환 R의 원소를 성분으로 하는 정사각행렬 M의 행렬식은 일반적으로 정의할 수 없는데, 그 정의에 반환 원소의 덧셈에 대한 역원이 관여하기 때문이다. 이를 대신하는 것은 양의 행렬식과 음의 행렬식의 쌍이다: \det\nolimits_+M=\sum_{\sigma\in\operatorname{Alt}(n)}M_{1\sigma(1)}\cdots M_{n\sigma(n)} \det\nolimits_-M=\sum_{\sigma\in\operatorname{Sym}(n)\setminus\operatorname{Alt}(n)}M_{1\sigma(1)}\cdots M_{n\sigma(n)} 여기서 합은 각각 짝순열과 홀순열에 대해 취한다.
범주의 원소를 성분으로 하는 행렬
행렬과 그 곱셈은 환에서의 곱셈과 유사한 "텐서 곱"이 갖추어지고 환에서의 덧셈과 유사한 쌍대곱(coproduct)을 가진 범주의 대상을 성분으로 하여 정의할 수 있는데, 전자가 후자에 대해 분배법칙을 만족해야 한다. 그러나 이렇게 정의된 곱셈은 통상적인 의미보다 약한 의미에서만 결합법칙을 만족할 수 있다. 이들은 *행렬의 쌍범주(bicategory of matrices)*라 불리는 더 큰 구조의 일부이다. 관심 있는 독자를 위한 위 요약의 완전한 기술은 다음과 같다.
(\mathcal C,\otimes,I)를 다음 두 조건을 만족하는 모노이드 범주라 하자:
- 모든 (작은) 쌍대곱이 존재한다; 특히, \varnothing 을 시작 대상이라 하자.
- 함자 \otimes가 쌍대곱에 대해 분배적이다; 즉, 모든 대상 X와 \mathcal C에서의 대상족 (Y_i){i\in I}에 대해, 표준적 \mathcal C-사상 \coprod{i\in I}(X\otimes Y_i)\to X\otimes\coprod_{i\in I}Y_i\coprod_{i\in I}(Y_i\otimes X)\to\left(\coprod_{i\in I}Y_i\right)\otimes X이 동형사상이다. 특히, 표준적 사상 \varnothing\to X\otimes\varnothing과 \varnothing\to\varnothing\otimes X는 동형사상이다. 그러면, \mathcal C-행렬의 쌍범주 \operatorname{Mat}(\mathcal C)는 다음과 같다:
- 대상은 집합이다.
- 1-사상 M\colon A\to B은 사상 M\colon A\times B\to\operatorname{Ob}(\mathcal C)이다; 이것은 \mathcal C 위의 행렬에 불과하다. ** 1-사상 M\colon A\to B과 N\colon B\to C의 합성은, 행렬 곱셈으로 이해할 수 있으며, 다음과 같다: (N\circ M)(a,c)=\coprod_{b\in B}M(a,b)\otimes N(b,c). ** A 위의 항등 1-사상은 다음과 같다: \operatorname{id}_A(a,b)=\begin{cases} I & a=b \ \varnothing & a\ne b \end{cases}.
- 1-사상 M,N\colon A\to B 사이의 2-사상은 \mathcal C-사상의 족 (f_{ab}\colon M(a,b)\to N(a,b))_{(a,b)\in A\times B}이다. 2-사상의 수직 합성과 수평 합성의 정의는 자연스럽다: 수직 합성은 \mathcal C-사상의 성분별 합성이고; 수평 합성은 \otimes의 함자성과 쌍대곱의 보편 성질로부터 유도된 것이다. 일반적으로, 행렬의 쌍범주는 엄밀한 2-범주일 필요가 없다. 예를 들어, 1-사상의 합성은 통상적인 엄밀한 의미에서의 결합법칙을 만족하지 않을 수 있으며, 단지 일관된 동형사상까지만(up to coherent isomorphism) 성립할 수 있다.
응용
행렬의 응용 분야는 수학과 다른 과학 분야 모두에서 매우 다양하다. 그중 일부는 단순히 행렬에 숫자 집합을 간결하게 표현할 수 있다는 점을 활용한다. 예를 들어, 텍스트 마이닝과 자동 시소러스 편찬에서는 여러 문서에서 특정 단어의 빈도를 추적하기 위해 tf-idf와 같은 문서-용어 행렬을 사용한다.
복소수는 다음과 같이 특정한 실수 2×2 행렬로 표현할 수 있다. a + ib \leftrightarrow \begin{bmatrix} a & -b \ b & a \end{bmatrix}, 이 표현 아래에서 복소수의 덧셈과 곱셈은 행렬의 덧셈과 곱셈에 대응한다. 예를 들어, 위에서 언급한 것처럼 2×2 회전 행렬은 절댓값이 1인 특정 복소수의 곱셈을 나타낸다. 사원수와 일반적인 클리포드 대수에 대해서도 유사한 해석이 가능하다.
게임 이론과 경제학에서 보수 행렬은 두 플레이어가 주어진 (유한한) 전략 집합 중 어떤 전략을 선택하느냐에 따른 보수를 부호화한다. 두 플레이어가 혼합 전략을 사용할 때 게임의 기대 결과는 전략을 나타내는 벡터를 이 행렬의 양쪽에 곱하여 얻는다. 게임 이론의 핵심인 미니맥스 정리는 선형 계획법의 쌍대성 이론과 밀접하게 관련되어 있으며, 선형 계획법은 흔히 행렬-벡터 곱의 형태로 정식화된다.
힐 암호와 같은 초기 암호화 기법에서도 행렬이 사용되었다. 그러나 행렬의 선형적 특성 때문에 이러한 암호는 비교적 쉽게 해독할 수 있다. 컴퓨터 그래픽스에서는 객체를 표현하고, 아핀 회전 행렬을 사용하여 3차원 객체를 2차원 화면에 투영하는 것(이론적 카메라 관측에 해당)과 같은 객체 변환을 계산하며, 선명화, 흐림, 윤곽 검출 등의 이미지 합성곱을 적용하는 데 행렬을 사용한다. 다항식 환 위의 행렬은 제어 이론 연구에서 중요하다.
화학에서는 특히 분자 결합과 분광학을 논의하기 위해 양자 이론을 사용하면서부터 다양한 방식으로 행렬을 활용한다. 예로는 하트리-폭 방법의 분자 궤도함수를 얻기 위해 루탄 방정식을 풀 때 사용되는 겹침 행렬과 폭 행렬이 있다.
그래프 이론

유한 그래프의 인접 행렬은 그래프 이론의 기본 개념이다. 이것은 그래프의 어떤 꼭짓점들이 변으로 연결되어 있는지를 기록한다. 서로 다른 두 값만을 포함하는 행렬(예를 들어 각각 "예"와 "아니오"를 의미하는)을 논리 행렬이라 한다. 거리(또는 비용) 행렬은 변들의 거리에 대한 정보를 포함한다. 이러한 개념은 하이퍼링크로 연결된 웹사이트나 도로로 연결된 도시 등에 적용할 수 있으며, 이 경우 (연결 네트워크가 극도로 밀집하지 않는 한) 행렬은 희소 행렬, 즉 0이 아닌 항목이 적은 경향이 있다. 따라서 네트워크 이론에서는 특별히 맞춤화된 행렬 알고리즘을 사용할 수 있다.
해석학과 기하학
미분 가능한 함수 f: \R^n \to \R의 헤세 행렬은 여러 좌표 방향에 대한 이계 도함수로 구성되며, 다음과 같다. H(f) = \left [\frac {\partial^2f}{\partial x_i , \partial x_j} \right ].
![함수의 [안장점 (빨간색)에서 헤세 행렬 \begin{bmatrix} 2 & 0 \ 0 & -2 \end{bmatrix}은 부정치이다.]]이것은 함수의 국소적 증가 거동에 대한 정보를 부호화한다: 임계점, 즉 의 일계 편도함수 \partial f / \partial x_i가 소멸하는 점이 주어졌을 때, 헤세 행렬이 양의 정치이면 그 함수는 극솟값을 갖는다. 이차 계획법은 행렬에 부속된 것과 밀접히 관련된 이차 함수의 전역 최솟값 또는 최댓값을 구하는 데 사용할 수 있다(위 참조).
{kind=link}
기하학적 상황에서 자주 사용되는 또 다른 행렬은 미분 가능 사상의 야코비 행렬이다. 의 성분을 로 나타내면 야코비 행렬은 다음과 같이 정의된다. J(f) = \left [\frac {\partial f_i}{\partial x_j} \right ]_{1 \leq i \leq m, 1 \leq j \leq n}. 이고 야코비 행렬의 계수가 최댓값 에 도달하면, 음함수 정리에 의해 는 그 점에서 국소적으로 역함수가 존재한다.^12
편미분 방정식은 방정식의 최고차 미분 연산자의 계수 행렬을 고려하여 분류할 수 있다. 타원형 편미분 방정식의 경우 이 행렬은 양의 정치이며, 이는 해당 방정식의 가능한 해 집합에 결정적인 영향을 미친다.
유한 요소법은 편미분 방정식을 풀기 위한 중요한 수치 해석법으로, 복잡한 물리 시스템의 시뮬레이션에 널리 적용된다. 이 방법은 충분히 세밀한 격자에 대해 선택된 구간별 선형 함수로 방정식의 해를 근사하려 시도하며, 이것은 다시 행렬 방정식으로 재구성할 수 있다.^13
확률론과 통계학
[[File:Markov chain SVG.svg|right|thumb|280px|두 가지 다른 마르코프 연쇄. 차트는 상태 "2"에 있는 입자 수(전체 1000개 중)를 나타낸다. 두 극한값은 전이 행렬로부터 결정할 수 있으며, 전이 행렬은 \left[\begin{smallmatrix} 0.7 & 0\ 0.3 & 1 \end{smallmatrix}\right] (빨간색)과 \left[\begin{smallmatrix} 0.7 & 0.2\ 0.3 & 0.8 \end{smallmatrix}\right] (검은색)으로 주어진다.]] 확률 행렬은 행이 확률 벡터인 정사각 행렬로, 즉 항목이 음이 아니고 합이 1인 행렬이다. 확률 행렬은 유한 상태를 갖는 마르코프 연쇄를 정의하는 데 사용된다. 확률 행렬의 한 행은 현재 해당 행에 대응하는 상태에 있는 입자의 다음 위치에 대한 확률 분포를 제공한다. 흡수 상태, 즉 어떤 입자든 결국 도달하게 되는 상태와 같은 마르코프 연쇄의 성질은 전이 행렬의 고유벡터로부터 읽어낼 수 있다.
통계학에서도 다양한 형태로 행렬을 활용한다.[^14] 기술 통계학은 데이터 집합을 기술하는 것에 관심을 두며, 이는 흔히 데이터 행렬로 표현할 수 있고 이후 차원 축소 기법을 적용할 수 있다. 공분산 행렬은 여러 확률 변수의 상호 분산을 부호화한다. 행렬을 사용하는 또 다른 기법은 선형 최소제곱법으로, 유한한 쌍의 집합을 선형 함수 y_i \approx ax_i + b, \quad i = 1, \ldots, N 로 근사하는 방법이며, 이는 행렬의 특이값 분해와 관련하여 행렬의 형태로 정식화할 수 있다.
랜덤 행렬은 항목이 행렬 정규 분포와 같은 적절한 확률 분포를 따르는 난수인 행렬이다. 확률론을 넘어 수론에서 물리학에 이르는 다양한 분야에 적용된다.^15
양자역학과 입자물리학
양자역학의 최초 모형(하이젠베르크, 1925)은 고전 물리학에서 위치, 운동량, 에너지와 같은 변수의 역할을 대신하는 연산자를 정의하기 위해 무한 차원 행렬을 사용하였다. (이것은 때때로 행렬역학이라 불린다.) 이후 유한 및 무한 차원 행렬은 양자역학에서 다양한 목적으로 사용되어 왔다. 특히 한 가지 예는 밀도 행렬로, 물리 시스템에 대해 수행된 측정 결과의 확률을 계산하는 데 사용되는 도구이다.
선형 변환과 관련 대칭성은 현대 물리학에서 핵심적인 역할을 한다. 예를 들어, 양자장론에서 기본 입자는 특수 상대론의 로런츠 군의 표현으로 분류되며, 더 구체적으로는 스핀 군 아래에서의 거동으로 분류된다. 파울리 행렬과 더 일반적인 감마 행렬을 포함하는 구체적 표현은 스피너로 행동하는 페르미온의 물리적 기술에서 필수적인 부분이다. 가장 가벼운 세 쿼크에 대해서는 특수 유니터리 군 SU(3)을 포함하는 군론적 표현이 있으며, 물리학자들은 이 계산을 위해 겔만 행렬로 알려진 편리한 행렬 표현을 사용한다. 이 행렬은 강한 핵 상호작용의 현대적 기술인 양자 색역학의 기초를 이루는 SU(3) 게이지 군에도 사용된다. 카비보-고바야시-마스카와 행렬은 약한 상호작용에서 중요한 기본 쿼크 상태가 특정하고 구별되는 질량을 정의하는 기본 쿼크 상태와 동일하지 않지만 선형적으로 관련되어 있다는 사실을 표현한다.
또 다른 행렬은 실험 입자물리학의 초석을 이루는 산란 실험을 기술하는 핵심 도구로 사용된다: 입자 가속기에서 일어나는 것과 같은 충돌 반응에서, 상호작용하지 않는 입자들이 서로를 향해 이동하여 작은 상호작용 영역에서 충돌하고 결과적으로 새로운 비상호작용 입자 집합이 생성되는 과정은 나가는 입자 상태와 들어오는 입자 상태의 선형 결합의 스칼라곱으로 기술할 수 있다. 이 선형 결합은 S-행렬로 알려진 행렬로 주어지며, 입자 간 가능한 모든 상호작용에 대한 정보를 부호화한다.
정규 모드
물리학에서 행렬의 일반적인 응용은 선형 결합된 조화 시스템의 기술이다. 이러한 시스템의 운동 방정식은 행렬 형태로 기술할 수 있는데, 질량 행렬이 일반화된 속도에 곱해져 운동 에너지 항을 주고, 힘 행렬이 변위 벡터에 곱해져 상호작용을 특성화한다. 해를 구하는 가장 좋은 방법은 행렬 방정식을 대각화하여 시스템의 고유벡터, 즉 정규 모드를 결정하는 것이다. 이러한 기법은 분자의 내부 역학, 즉 상호 결합된 구성 원자로 이루어진 시스템의 내부 진동을 다룰 때 매우 중요하다. 또한 기계적 진동과 전기 회로에서의 진동을 기술하는 데에도 필요하다.
기하광학
기하광학은 행렬의 추가적인 응용을 제공한다. 이 근사 이론에서는 빛의 파동 특성이 무시된다. 그 결과 광선이 실제로 기하학적 직선인 모형이 된다. 광학 요소에 의한 광선의 편향이 작을 경우, 렌즈나 반사 요소가 주어진 광선에 미치는 작용은 광선 전달 행렬 해석이라 불리는 2×2 행렬과 이성분 벡터의 곱으로 표현할 수 있다: 벡터의 성분은 광선의 기울기와 광축으로부터의 거리이며, 행렬은 광학 요소의 성질을 부호화한다. 행렬에는 두 종류가 있는데, 렌즈 표면에서의 굴절을 기술하는 굴절 행렬과 기준면을 다음 굴절 표면으로 이동시키는 것을 기술하는 이동 행렬이 있으며, 다음 굴절 표면에서는 또 다른 굴절 행렬이 적용된다. 렌즈와 반사 요소의 조합으로 이루어진 광학 시스템은 단순히 각 구성 요소의 행렬 곱으로 얻어지는 행렬로 기술된다.
존스 미적분은 광원의 편광을 2\times 2 벡터로, 이 편광 벡터에 대한 광학 필터의 효과를 행렬로 모형화한다.
전자공학
선형 소자(저항기, 인덕터, 축전기 등)로 구성된 전자 회로는 키르히호프의 회로 법칙을 따르며, 이는 선형 방정식 체계로 이어진다. 이것은 원천 전류와 전압을 회로의 각 지점에서의 결과 전류 및 전압에 관련시키는 행렬 방정식으로 기술할 수 있으며, 행렬의 항목은 회로에 의해 결정된다.
역사
행렬은 연립방정식을 푸는 데 오랜 응용 역사를 가지고 있지만, 1800년대까지는 배열(array)로 알려져 있었다. 기원전 10세기~2세기에 쓰인 중국의 문헌 *구장산술(九章算術)*은 연립방정식을 풀기 위해 배열 방법을 사용한 최초의 사례로,^17 행렬식의 개념도 포함하고 있다. 1545년 이탈리아의 수학자 Gerolamo Cardano는 *아르스 마그나(Ars Magna)*를 출판하면서 이 방법을 유럽에 소개하였다. 일본의 수학자 세키는 1683년에 같은 배열 방법을 사용하여 연립방정식을 풀었다.[^18] 네덜란드의 수학자 Jan de Witt는 1659년 저서 곡선의 원론(Elements of Curves)(1659)에서 배열을 사용하여 변환을 표현하였다. 1700년에서 1710년 사이에 Gottfried Wilhelm Leibniz는 정보나 해를 기록하기 위한 배열의 사용을 공표하였고, 50가지가 넘는 다양한 배열 체계를 실험하였다. Cramer는 1750년에 자신의 법칙을 발표하였다.
수학에서 *행렬(matrix)*이라는 용어의 사용(19세기 영어에서 "자궁"을 뜻하는 단어로, 라틴어에서 유래하였으며, 인쇄, 생물학, 지질학에서의 전문 용어이기도 하다[^19])은 1850년 James Joseph Sylvester가 만들었으며,[^20] 그는 행렬을 오늘날 소행렬식이라 불리는 여러 행렬식을 생성하는 대상으로 이해하였다. 즉, 원래 행렬에서 열과 행을 제거하여 파생된 더 작은 행렬의 행렬식을 의미한다. 1851년 논문에서 Sylvester는 다음과 같이 설명하였다:
Arthur Cayley는 이전에 행해졌던 것처럼 조사 대상인 계수의 회전된 버전이 아닌 행렬을 사용하여 기하학적 변환에 관한 논문을 출판하였다. 대신 그는 덧셈, 뺄셈, 곱셈, 나눗셈과 같은 연산을 해당 행렬의 변환으로 정의하고 결합법칙과 분배법칙이 성립함을 보였다. Cayley는 행렬 곱셈의 비가환성과 행렬 덧셈의 가환성을 연구하고 증명하였다. 초기 행렬 이론은 배열의 사용을 거의 행렬식에만 한정하였으며, Cayley의 추상적 행렬 연산은 혁명적이었다. 그는 방정식 체계와 독립적인 행렬 개념을 제안하는 데 핵심적인 역할을 하였다. 1858년 Cayley는 *행렬 이론에 관한 회고록(A memoir on the theory of matrices)*을 출판하여 케일리-해밀턴 정리를 제안하고 증명하였다.
영국의 수학자 Cuthbert Edmund Cullis는 1913년에 행렬에 대한 현대적 괄호 표기법을 최초로 사용하였으며, 동시에 행렬을 나타내기 위해 번째 행과 번째 열을 가리키는 표기법의 최초의 중요한 사용을 보여주었다.
행렬식에 대한 현대적 연구는 여러 출처에서 비롯되었다. 정수론적 문제들로 인해 Gauss는 이차형식의 계수, 즉 와 같은 식과 3차원에서의 선형 사상을 행렬과 관련짓게 되었다. Eisenstein은 이러한 개념들을 더욱 발전시켰으며, 현대적 용어로 말하자면 행렬 곱은 비가환적이라는 점도 언급하였다. Cauchy는 행렬식에 관한 일반적인 명제를 최초로 증명하였으며, 행렬 의 행렬식의 정의로 다음을 사용하였다: 다항식에서 거듭제곱 을 로 대체하라. a_1 a_2 \cdots a_n \prod_{i < j} (a_j - a_i), 여기서 \textstyle\prod는 표시된 항들의 곱을 나타낸다. 그는 또한 1829년에 대칭 행렬의 고유값이 실수임을 보였다. Jacobi는 "함수 행렬식"—나중에 Sylvester에 의해 야코비 행렬식이라 불림—을 연구하였는데, 이는 국소적(또는 무한소적) 수준에서 기하학적 변환을 기술하는 데 사용될 수 있으며, 위를 참조하라. Kronecker의 행렬식 이론에 관한 강의(Vorlesungen über die Theorie der Determinanten)^21와 Weierstrass의 행렬식 이론에 대하여(Zur Determinantentheorie)^22는 모두 1903년에 출판되었으며, 앞서 언급한 Cauchy의 공식과 같은 이전의 더 구체적인 접근법과는 달리 행렬식을 처음으로 공리적으로 다루었다. 이 시점에서 행렬식은 확고히 정립되었다.
많은 정리들이 처음에는 작은 행렬에 대해서만 증명되었다. 예를 들어, 케일리-해밀턴 정리는 앞서 언급한 회고록에서 Cayley에 의해 행렬에 대해, Hamilton에 의해 행렬에 대해 증명되었다. 쌍선형 형식을 연구하던 Frobenius는 이 정리를 모든 차원으로 일반화하였다(1898). 또한 19세기 말에 가우스-조르단 소거법(현재 가우스 소거법으로 알려진 특수한 경우를 일반화한 것)이 Wilhelm Jordan에 의해 정립되었다. 20세기 초에 행렬은 선형대수학에서 핵심적인 역할을 차지하게 되었는데, 이는 부분적으로 이전 세기의 초복소수 체계 분류에서의 사용에 기인한다.
양자역학에서 Heisenberg, Born, Jordan에 의한 행렬역학의 탄생은 무한히 많은 행과 열을 가진 행렬의 연구로 이어졌다. 이후 von Neumann은 힐베르트 공간 위의 선형 작용소와 같은 함수해석학적 개념을 더욱 발전시켜 양자역학의 수학적 정식화를 수행하였는데, 힐베르트 공간은 매우 대략적으로 말하면 유클리드 공간에 대응하지만 무한히 많은 독립 방향을 가진다.
수학에서 "행렬(matrix)"이라는 단어의 기타 역사적 용법
이 단어는 역사적으로 중요한 최소 두 명의 저자에 의해 특이한 방식으로 사용된 바 있다.
Bertrand Russell과 Alfred North Whitehead는 그들의 수학 원리(Principia Mathematica)(1910–1913)에서 환원 가능성 공리의 맥락에서 "행렬(matrix)"이라는 단어를 사용하였다. 그들은 이 공리를 임의의 함수를 차례로 더 낮은 유형의 함수로 환원하는 수단으로 제안하여, "최하위"(0차)에서 함수가 그 외연과 동일하게 되도록 하였다:[^23]
예를 들어, 두 변수 와 에 대한 함수 는 변수 의 자리에 "개체" 의 가능한 모든 값을 대입하여 "고려"함으로써 단일 변수의 함수 과 같은 함수들의 모음으로 환원할 수 있다. 그런 다음 단일 변수 의 함수들의 결과적 모음, 즉 은 변수 의 자리에 "개체" 의 가능한 모든 값을 대입하여 "고려"함으로써 값들의 "행렬"로 환원할 수 있다: \forall b_j \forall a_i \colon \phi(a_i, b_j).
Alfred Tarski는 1941년 저서 *논리학 입문(Introduction to Logic)*에서 수리논리학에서 사용되는 진리표의 개념과 동의어로 "행렬(matrix)"이라는 단어를 사용하였다.
같이 보기
- 이름이 있는 행렬 목록
-
- 비정칙 행렬
-
-
주석
-
수학 참고 문헌
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
- .
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
물리학 참고 문헌
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
역사 참고 문헌
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
- , 1907년 원판의 복간본
- ; The collected mathematical papers of Arthur Cayley, vol. II, Cambridge University Press, 1889, pp. 475–496에 재수록.
-
-
-
-
-
-
-
-
-
-
-
-
- ; 1946년 수정 인쇄본의 복간본, Dover Publications, 1995,
-
-
-
-
-
-
-
-
-
-
-
-
더 읽을거리
-
-
-
외부 링크
-
-
- 행렬과 벡터 기호의 초기 사용
각주
[^1]: class="wikitable" style="max-width:45em;" +행렬 크기 개요
!scope="col" 이름 !scope="col" 크기 !scope="col" 예시 !scope="col" 설명
!scope="row" [[행 행렬]] 1
[^2]: 행렬 {{!
[^4]: Horn, Roger A.. 행렬 해석. Cambridge University Press
[^5]: harvtxt Greub 1975 p=90 . 다만 Greub는 행렬에 열벡터를 곱하는 대신 행벡터에 행렬을 곱하여 변환을 나타내는 전치 관례를 따르고 있음에 유의하라.
[^6]: ''Eigen''은 [[독일어]]와 [[네덜란드어]]로 "고유한"이라는 뜻이다. 위키낱말사전 참조.
[^7]: 표현론 또는 [[군 표현론]]의 아무 참고 문헌이나 참조할 것.
[^9]: "행렬 이론의 많은 부분이 무한차원 공간으로 이어지지 않으며, 이어지는 부분도 그다지 유용하지 않지만, 때로는 도움이 된다." Harvard citations last1=Halmos year=1982 loc=p. 23, 제5장 nb
[^11]: 공행렬의 표기법은 일부 출처와 다르게 사용된다. 예를 들어 harvp Bernstein 2009 p=[http://books.google.com/books?id=-c0NxJg4vHMC&pg=PA90 90] 에서는 nowrap 0_ 0 \times n 을 사용한다.
[^14]: Healy, Michael. 통계를 위한 행렬. [[Oxford University Press]]
[^18]: Needham, Joseph. 중국의 과학과 문명. Cambridge University Press
[^19]: 행렬. Clarendon Press
[^20]: 가장 먼저 출판된 예시는 J. J. Sylvester (1850) "이 학술지 9월호에 실린 '새로운 유형의 정리에 대하여'와 파스칼의 정리에 관한 기사의 추가 사항," ''The London, Edinb
[^23]: Whitehead, Alfred North; and Russell, Bertrand (1913) ''*56까지의 수학 원리'', Cambridge at the University Press, Cambridge UK (1962년 재출간) 162쪽 이하 참조.
관련 인사이트
공장의 뇌는 어떻게 생겼는가 — 제조운영 AI 아키텍처 해부
지식관리, 업무자동화, 의사결정지원 — 따로 보면 다 있던 것들입니다. 제조 AI의 진짜 차이는 이 셋이 순환하면서 '우리 공장만의 지능'을 만든다는 데 있습니다.

그 30분을 18년 동안 매일 반복했습니다 — 품질팀장이 본 AI Agent
18년차 품질팀장이 매일 아침 30분씩 반복하던 데이터 분석을 AI Agent가 3분 만에 해냈습니다. 챗봇과는 완전히 다른 물건 — 직접 시스템에 접근해서 데이터를 꺼내고 분석하는 AI의 현장 도입기.

ERP 20년, 나는 왜 AI를 얹기로 했나
ERP 20년차 제조IT본부장의 고백: 3,200만 행의 데이터가 잠들어 있었다. ERP를 바꾸지 않고 AI를 얹자, 일주일 걸리던 불량 분석이 수 초로 줄었다.