이산 푸리에 변환
_+_cos(4t)_25_points.svg)
수학에서 이산 푸리에 변환(DFT, discrete Fourier transform)은 유한한 수열을 같은 길이의 다른 수열로 변환하는 푸리에 변환의 이산 버전으로, 서로 다른 주파수 성분의 강도와 위상을 나타낸다. 이러한 방식으로, 표본값으로 기술된 데이터를 진동으로 기술된 데이터로 변환한다. 역이산 푸리에 변환은 이 과정을 역으로 수행하여 원래의 수열을 복원한다.
등간격으로 표본화된 데이터의 경우, DFT는 표본값과 해당 값들을 보간하는 삼각 다항식의 계수 사이의 변환으로 더 정확하게 이해할 수 있다. 따라서 이것은 삼각 다항식으로 잘 근사할 수 있는 매끄러운 주기 함수를 다루는 수치 작업의 기본 도구이다. 실제로 DFT는 보통 효율적인 고속 푸리에 변환(FFT) 알고리즘으로 계산된다.
DFT는 푸리에 해석의 많은 실용적인 응용 분야에서 사용된다.[^1] 역DFT(IDFT)는 DTFT 표본을 해당 DTFT 주파수의 복소 정현파 계수로 사용하는 푸리에 급수이다. 이는 원래 입력 수열과 동일한 표본값을 갖는다. 따라서 DFT는 원래 입력 수열의 주파수 영역 표현이라고 한다. 원래 수열이 함수의 모든 영이 아닌 값을 포함하는 경우, 해당 DTFT는 연속적(이며 주기적)이고, DFT는 한 주기의 이산 표본을 제공한다. 원래 수열이 주기 함수의 한 주기인 경우, DFT는 한 DTFT 주기의 모든 영이 아닌 값을 제공한다.
는 다양한 방식으로 해석하거나 유도할 수 있으며, 예를 들면 다음과 같다:
예제
이 예제는 길이 N = 4인 수열과 입력 벡터에 DFT를 적용하는 방법을 보여준다.
\mathbf{x} = \begin{pmatrix} x_0 \ x_1 \ x_2 \ x_3 \end{pmatrix}
\begin{pmatrix} 1 \ 2-i \ -i \ -1+2i \end{pmatrix}.
다음을 사용하여 \mathbf{x}의 DFT를 계산하면
\begin{align} X_0 &= e^{-i 2 \pi 0 \cdot 0 / 4} \cdot 1 + e^{-i 2 \pi 0 \cdot 1 / 4} \cdot (2-i) + e^{-i 2 \pi 0 \cdot 2 / 4} \cdot (-i) + e^{-i 2 \pi 0 \cdot 3 / 4} \cdot (-1+2i) = 2 \ X_1 &= e^{-i 2 \pi 1 \cdot 0 / 4} \cdot 1 + e^{-i 2 \pi 1 \cdot 1 / 4} \cdot (2-i) + e^{-i 2 \pi 1 \cdot 2 / 4} \cdot (-i) + e^{-i 2 \pi 1 \cdot 3 / 4} \cdot (-1+2i) = -2-2i \ X_2 &= e^{-i 2 \pi 2 \cdot 0 / 4} \cdot 1 + e^{-i 2 \pi 2 \cdot 1 / 4} \cdot (2-i) + e^{-i 2 \pi 2 \cdot 2 / 4} \cdot (-i) + e^{-i 2 \pi 2 \cdot 3 / 4} \cdot (-1+2i) = -2i \ X_3 &= e^{-i 2 \pi 3 \cdot 0 / 4} \cdot 1 + e^{-i 2 \pi 3 \cdot 1 / 4} \cdot (2-i) + e^{-i 2 \pi 3 \cdot 2 / 4} \cdot (-i) + e^{-i 2 \pi 3 \cdot 3 / 4} \cdot (-1+2i) = 4+4i \end{align}
결과는 다음과 같다. \mathbf{X} = \begin{pmatrix} X_0 \ X_1 \ X_2 \ X_3 \end{pmatrix}
\begin{pmatrix} 2 \ -2-2i \ -2i \ 4+4i \end{pmatrix}.
성질
선형성
DFT는 선형 변환이다. 즉, \mathcal{F}({x_n})_k=X_k이고 \mathcal{F}({y_n})_k=Y_k이면, 임의의 복소수 a,b에 대해 다음이 성립한다: \mathcal{F}({a x_n + b y_n})_k=a X_k + b Y_k
시간 및 주파수 반전
시간을 반전하면(즉, n을 N-n으로 대체하면) x_n에서 주파수의 반전(즉, k를 N-k로 대체)에 대응한다.[^2] 플랑셰렐 정리는 파르세발 정리의 특수한 경우이며 다음과 같이 기술된다:
\sum_{n=0}^{N-1} |x_n|^2 = \frac{1}{N} \sum_{k=0}^{N-1} |X_k|^2.
이 정리들은 아래의 유니터리 조건과도 동치이다.
주기성
주기성은 정의로부터 직접 보일 수 있다:
X_{k+N} \ \triangleq \ \sum_{n=0}^{N-1} x_n e^{-\frac{i 2\pi}{N} (k+N) n} = \sum_{n=0}^{N-1} x_n e^{-\frac{i 2\pi}{N} k n} \underbrace{e^{-i 2 \pi n}}{1} = \sum{n=0}^{N-1} x_n e^{-\frac{i 2\pi}{N} k n} = X_k.
마찬가지로, IDFT 공식이 x_n의 주기적 확장을 이끌어 냄을 보일 수 있다.
이동 정리
x_n에 어떤 정수 m에 대한 선형 위상 e^{\frac{i 2\pi}{N} nm}을 곱하면 출력 X_k의 순환 이동에 대응한다: X_k가 X_{k-m}으로 대체되며, 여기서 아래 첨자는 N에 대한 모듈로(즉, 주기적)로 해석된다. 마찬가지로, 입력 x_n의 순환 이동은 출력 X_k에 선형 위상을 곱하는 것에 대응한다. 수학적으로, {x_n}이 벡터 x를 나타낸다면
\mathcal{F}({x_n})k=X_k일 때 \mathcal{F}\left(\left{ x_n \cdot e^{\frac{i 2\pi}{N}n m} \right}\right)k=X{k-m} 이고 \mathcal{F}\left(\left{x{n-m}\right}\right)_k=X_k \cdot e^{-\frac{i 2\pi}{N}k m}
순환 합성곱 정리와 상호상관 정리
이산시간 푸리에 변환(DTFT)에 대한 합성곱 정리는 두 수열의 합성곱을 각 변환의 곱의 역변환으로 구할 수 있음을 나타낸다. 수열 중 하나가 N-주기적일 때 중요한 단순화가 일어나며, 여기서 이를 y_{N},으로 표기한다. 이는 \scriptstyle \text{DTFT} \displaystyle {y{_N}}가 이산 주파수에서만 0이 아니기 때문이며(참조), 따라서 연속 함수 \scriptstyle \text{DTFT} \displaystyle {x}.와의 곱도 마찬가지이다. 이는 역변환의 상당한 단순화로 이어진다.
x * y_{N}\ =\ \scriptstyle{\rm DTFT}^{-1} \displaystyle \left[\scriptstyle{\rm DTFT} \displaystyle {x}\cdot \scriptstyle{\rm DTFT} \displaystyle {y{N}}\right]\ =\ \scriptstyle{\rm DFT}^{-1} \displaystyle \left[\scriptstyle{\rm DFT} \displaystyle {x{N}}\cdot \scriptstyle{\rm DFT} \displaystyle {y{_N}}\right],
여기서 x_{N}은 x 수열의 주기적 합산이다**:** (x{N})n\ \triangleq \sum{m=-\infty}^{\infty} x{(n-mN)}.
관례적으로, DFT와 역DFT의 합산은 정의역 [0,N-1]에서 수행된다. 이러한 DFT를 X와 Y로 정의하면, 결과는 다음과 같다**:**
실제로, x 수열은 보통 길이가 N 이하이고, y_{_N}은 N-길이 y-수열의 주기적 확장이며, 이는 순환 함수로도 표현할 수 있다**:**
(y_{N})n = \sum{p=-\infty}^\infty y{(n-pN)} = y_{(n\operatorname{mod}N)}, \quad n\in\mathbb{Z}. 그러면 합성곱은 다음과 같이 쓸 수 있다**:**
{{Equation box 1|title= |indent =: |cellpadding= 6 |border |border colour = #0073CF |background colour=#F5FFFA |equation = \mathcal{F}^{-1} \left { X\cdot Y \right }n = \sum{\ell=0}^{N-1}x_\ell \cdot y_{_{(n-\ell)\operatorname{mod}N}} }}
이것은 x와 y의 순환 합성곱이라는 해석을 가능하게 한다.[^3][^4]
\mathcal{F}^{-1}({x_n}) = \frac{1}{N}\mathcal{F}({x_{N - n}})
(관례적으로, 아래 첨자는 N에 대한 모듈로로 해석된다; 따라서 n = 0일 때, x_{N-0} = x_0이다.)
둘째, 입력과 출력을 켤레 복소수로 취할 수도 있다:
\mathcal{F}^{-1}(\mathbf{x}) = \frac{1}{N}\mathcal{F}\left(\mathbf{x}^\right)^
셋째, 이 켤레 기법의 변형으로, 데이터 값의 수정이 필요하지 않아 때때로 더 선호되는 방법은 실수부와 허수부를 교환하는 것이다(컴퓨터에서는 단순히 포인터를 수정하여 수행할 수 있다). \operatorname{swap}(x_n)을 x_n의 실수부와 허수부를 교환한 것으로 정의한다—즉, x_n = a + b i이면 \operatorname{swap}(x_n)은 b + a i이다. 동치적으로, \operatorname{swap}(x_n)은 i x_n^*과 같다. 그러면
\mathcal{F}^{-1}(\mathbf{x}) = \frac{1}{N}\operatorname{swap}(\mathcal{F}(\operatorname{swap}(\mathbf{x})))
즉, 역변환은 정규화 인수를 제외하면 입력과 출력 모두의 실수부와 허수부를 교환한 순방향 변환과 동일하다.
켤레 기법은 또한 DFT와 밀접하게 관련된 새로운 변환, 즉 자기 자신이 역변환인 대합 변환을 정의하는 데에도 사용할 수 있다. 특히, T(\mathbf{x}) = \mathcal{F}\left(\mathbf{x}^\right) / \sqrt{N}은 분명히 자기 자신의 역이다: T(T(\mathbf{x})) = \mathbf{x}. 밀접하게 관련된 대합 변환(\frac{1 + i}{\sqrt{2}}의 인수에 의한)은 H(\mathbf{x}) = \mathcal{F}\left((1 + i) \mathbf{x}^\right) / \sqrt{2N}이며, H(H(\mathbf{x}))에서 (1 + i) 인수들이 2를 상쇄하기 때문이다. 실수 입력 \mathbf{x}에 대해, H(\mathbf{x})의 실수부는 다름 아닌 이산 하틀리 변환이며, 이 또한 대합 변환이다.
고윳값과 고유벡터
DFT 행렬의 고윳값은 단순하고 잘 알려져 있는 반면, 고유벡터는 복잡하고 유일하지 않으며 현재도 연구가 진행 중인 주제이다. 명시적 공식은 상당한 양의 정수론과 함께 주어진다.[^22]
길이 N의 DFT에 대해 위에서 정의한 유니터리 형식 \mathbf{U}를 고려하자. 여기서 \mathbf{U}_{m,n} = \frac 1{\sqrt{N}}\omega_N^{(m-1)(n-1)} = \frac 1{\sqrt{N}}e^{-\frac{i 2\pi}N (m-1)(n-1)}. 이 행렬은 다음의 행렬 다항식 방정식을 만족한다: \mathbf{U}^4 = \mathbf{I}. 이는 위의 역변환 성질로부터 알 수 있다: \mathbf{U}를 두 번 적용하면 원래 데이터가 역순으로 나오므로, \mathbf{U}를 네 번 적용하면 원래 데이터로 돌아오며 따라서 항등 행렬이 된다. 이는 고윳값 \lambda가 다음 방정식을 만족함을 의미한다: \lambda^4 = 1. 따라서, \mathbf{U}의 고윳값은 1의 네제곱근이다: \lambda는 +1, −1, +i, 또는 −i이다.
이 N\times N 행렬에 대해 네 개의 서로 다른 고윳값만 존재하므로, 이들은 어떤 중복도를 가진다. 중복도는 각 고윳값에 대응하는 선형 독립인 고유벡터의 수를 나타낸다. (N개의 독립 고유벡터가 존재한다; 유니터리 행렬은 결코 결함이 없다.)
중복도 문제는 McClellan과 Parks(1972)에 의해 해결되었으나, 나중에 Gauss가 해결한 문제와 동치임이 밝혀졌다(Dickinson and Steiglitz, 1982). 중복도는 N을 4로 나눈 나머지에 따라 달라지며, 다음 표로 주어진다:
{| class="wikitable" style="margin:auto;" |+ align="bottom" | 변환 크기 N의 함수로서 유니터리 DFT 행렬 U의 고윳값 λ의 중복도 (정수 m으로 표현). |- ! 크기 N ! λ = +1 ! λ = −1 ! λ = −i ! λ = +i |- | 4m || m + 1 || m || m || m − 1 |- | 4m + 1 || m + 1 || m || m || m |- | 4m + 2 || m + 1 || m + 1 || m || m |- | 4m + 3 || m + 1 || m + 1 || m + 1 || m |}
달리 말하면, \mathbf{U}의 특성다항식은 다음과 같다: \det (\lambda I - \mathbf{U})= (\lambda-1)^{\left\lfloor \tfrac {N+4}{4}\right\rfloor} (\lambda+1)^{\left\lfloor \tfrac {N+2}{4}\right\rfloor} (\lambda+i)^{\left\lfloor \tfrac {N+1}{4}\right\rfloor} (\lambda-i)^{\left\lfloor \tfrac {N-1}{4}\right\rfloor}.
일반적인 고유벡터에 대한 간단한 해석적 공식은 알려져 있지 않다. 더욱이, 같은 고윳값에 대한 고유벡터의 임의의 선형 결합도 그 고윳값에 대한 고유벡터이므로 고유벡터는 유일하지 않다. 다양한 연구자들이 직교성과 같은 유용한 성질을 만족하고 "간단한" 형태를 가지도록 선택된 서로 다른 고유벡터를 제안하였다(예: McClellan and Parks, 1972; Dickinson and Steiglitz, 1982; Grünbaum, 1982; Candan et al., 2000; Hanna et al., 2004; Gurevich and Hadani, 2008).[^5]
고윳값 \lambda에 대한 DFT 고유벡터를 구성하는 한 가지 방법은 연산자의 선형 결합에 기반한다:[^23][^6][^7]
\mathcal{P}_\lambda=\frac{1}{4}\left( \mathbf{I}+\lambda^{-1}\mathbf{U}+\lambda^{-2}\mathbf{U}^2+\lambda^{-3} \mathbf{U}^3\right)
임의의 벡터 \mathbf{v}에 대해, 벡터 \mathbf{u}(\lambda)=\mathcal{P}_{\lambda}\mathbf{v}는 다음을 만족한다:
\textbf{U}\mathbf{u}(\lambda)=\lambda \mathbf{u}(\lambda)
따라서, 벡터 \mathbf{u}(\lambda)는 실제로 DFT 행렬 \mathbf{U}의 고유벡터이다. 연산자 \mathcal{P}{\lambda} 는 각 \lambda 값에 대해 서로 직교하는 부분공간으로 벡터를 사영한다.[^6] 즉, 두 고유벡터 \mathbf{u}(\lambda)=\mathcal{P}{\lambda}\mathbf{v}와 \mathbf{u}'(\lambda')=\mathcal{P}_{\lambda'}\mathbf{v}'에 대해 다음이 성립한다:
\mathbf{u}^\dagger(\lambda) \mathbf{u}'(\lambda')= \delta_{\lambda\lambda'}\mathbf{u}^\dagger(\lambda) \mathbf{v}'
그러나 일반적으로, 사영 연산자 방법은 하나의 부분공간 내에서 직교 고유벡터를 생성하지는 않는다.[^7] 연산자 \mathcal{P}{\lambda}는 열이 \mathbf{U}의 고유벡터인 행렬로 볼 수 있지만, 이들은 직교하지 않는다. N{\lambda}-차원 공간(여기서 N_{\lambda}는 고윳값 \lambda의 중복도)을 생성하는 벡터 집합 {\mathbf{v}n}{n=1,\dots,N_{\lambda}}을 선택하여 고윳값 \lambda에 대한 고유벡터 집합 {\mathbf{u}n(\lambda)=\mathcal{P}{\lambda}\mathbf{v}n}{n=1,\dots,N_{\lambda}}을 생성할 때, \mathbf{u}n(\lambda)의 상호 직교성은 보장되지 않는다. 그러나, 집합 {\mathbf{u}n(\lambda)}{n=1,\dots,N{\lambda}}에 직교화 알고리즘, 예를 들어 그람-슈미트 과정을 추가로 적용하여 직교 집합을 얻을 수 있다.[^24]
DFT 고유벡터를 얻는 직접적인 접근법은 연속 푸리에 변환의 고유함수를 이산화하는 것이며, 그 중 가장 유명한 것은 가우스 함수이다. 함수의 주기적 합산은 주파수 스펙트럼의 이산화를 의미하고, 이산화는 스펙트럼의 주기적 합산을 의미하므로, 이산화되고 주기적으로 합산된 가우스 함수는 이산 변환의 고유벡터를 생성한다:
- F(m) = \sum_{k\in\mathbb{Z}} \exp\left(-\frac{\pi\cdot(m+N\cdot k)^2}{N}\right).
이 급수의 닫힌 형태 표현은 야코비 세타 함수로 다음과 같이 나타낼 수 있다:
- F(m) = \frac1{\sqrt{N}}\vartheta_3\left(\frac{\pi m}N, \exp\left(-\frac{\pi}N \right)\right).
특수한 DFT 주기 N에 대한 몇 가지 다른 간단한 닫힌 형태 해석적 고유벡터가 발견되었다(Casper-Yakimov, 2024):[^25]
DFT 주기 N = 2L + 1 = 4K + 1(여기서 K는 정수)인 경우, 다음은 DFT의 고유벡터이다:
- F(m) = \prod_{s=K+1}^L \left[\cos\left(\frac{2\pi}{N}m\right) - \cos\left(\frac{2\pi}{N}s\right)\right]
DFT 주기 N = 2L = 4K(여기서 K는 정수)인 경우, 다음은 DFT의 고유벡터이다:
- F(m) = \sin\left(\frac{2\pi}{N}m\right) \prod_{s=K+1}^{L-1}\left[\cos\left(\frac{2\pi}{N}m\right)- \cos\left(\frac{2\pi}{N}s\right)\right]
- F(m) = \cos\left(\frac{\pi}{N}m\right)\prod_{s=K+1}^{3K-1} \sin\left(\frac{\pi(s-m)}{N}\right)
DFT 주기 N = 4K - 1(여기서 K는 정수)인 경우, 다음은 DFT의 고유벡터이다:
- F(m) = \sin\left(\frac{2\pi}{N}m\right)\prod_{s=K+1}^{3K-2} \sin\left(\frac{\pi(s-m)}{N}\right)
- F(m) = \left(\cos\left(\frac{2\pi}{N}m\right)-\cos\left(\frac{2\pi}{N} K \right) \pm \sin\left(\frac{2\pi}{N}K\right)\right)\prod_{s=K+1}^{3K-2} \sin\left(\frac{\pi(s-m)}{N}\right)
DFT 행렬의 고유벡터 선택은 이산 분수 푸리에 변환의 이산 유사체를 정의하기 위해 최근 몇 년간 중요해졌다—DFT 행렬은 고윳값을 지수화하여 분수 거듭제곱으로 취할 수 있다.[^8] 연속 푸리에 변환에 대해, 자연스러운 직교 고유함수는 에르미트 함수이므로, 크라프추크 다항식과 같은 다양한 이산 유사체가 DFT의 고유벡터로 사용되어 왔다.[^5] 그러나 분수 이산 푸리에 변환을 정의하기 위한 "최선의" 고유벡터 선택은 여전히 미해결 문제로 남아 있다.
불확정성 원리
확률론적 불확정성 원리
확률 변수가 다음 조건으로 제약될 때 \sum_{n=0}^{N-1} |X_n|^2 = 1 ,
P_n=|X_n|^2 은 이산 확률 질량 함수를 나타내는 것으로 간주할 수 있으며, 변환된 변수로부터 구성된 관련 확률 질량 함수는 다음과 같다. Q_m = N |x_m|^2 .
연속 함수 P(x)와 Q(k)의 경우, 하이젠베르크 불확정성 원리는 다음과 같이 기술된다. D_0(X)D_0(x)\ge\frac{1}{16\pi^2} 여기서 D_0(X)와 D_0(x)는 각각 |X|^2과 |x|^2의 분산이며, 적절히 정규화된 가우스 분포의 경우 등호가 성립한다. DFT에 대해서도 분산을 유사하게 정의할 수 있지만, 유사한 불확정성 원리는 불확정성이 이동 불변이 아니기 때문에 유용하지 않다. 그럼에도 불구하고, Massar와 Spindel에 의해 의미 있는 불확정성 원리가 도입되었다.[^9] [^10] [^11] [^12] [^13] [^14] [^15] [^16] [^17] [^18] [^19] [^20] [^21] }}
더 읽을거리
-
-
- 특히 30.2절: DFT와 FFT, pp. 830–838.
-
-
- (이 논문의 고유값 중복도 표에 명백한 오타가 있음을 유의할 것: +i/−i 열이 서로 바뀌어 있다. 올바른 표는 McClellan and Parks, 1972에서 찾을 수 있으며, 수치적으로도 쉽게 확인할 수 있다.)
-
-
-
-
-
-
외부 링크
-
-
-
-
-
- DFT의 대화형 설명
- 이산 푸리에 변환에 대한 Matlab 튜토리얼
- DFT에 대한 대화형 플래시 튜토리얼
- Julius O. Smith III의 이산 푸리에 변환의 수학
- FFTW: DFT의 고속 구현 - C로 작성되었으며 일반 공중 사용 허가서(GPL) 적용
- 범용 FFT 패키지: C 및 FORTRAN으로 작성된 또 다른 고속 DFT 구현, 허용적 라이선스
- 설명: 이산 푸리에 변환
- 이산 푸리에 변환
- 이산 푸리에 변환의 인덱싱과 이동
- 이산 푸리에 변환의 성질
- 비선형 위상을 갖는 일반화 이산 푸리에 변환(GDFT)
cs:Fourierova transformace#Diskrétní Fourierova transformace pt:Transformada de Fourier#Transformada discreta de Fourier fi:Fourier'n muunnos#Diskreetti Fourier'n muunnos
참고 문헌
[^1]: 이산 푸리에 변환
[^2]: Gbur, Greg. 광학 물리학 및 공학을 위한 수학적 방법. Cambridge University Press
[^3]: Amiot, Emmanuel. 푸리에 공간을 통한 음악. Springer. (2016)
[^4]: 합성곱을 점별 곱으로 변환하는 모든 선형 변환은 계수의 순열까지 DFT와 동일하다. n개 원소의 순열 수는 n!이므로, 정확히 n!개가 존재한다.
[^5]: 분수 푸리에-크라프축 변환
[^6]: Candan, Ç. (2011). DFT 행렬의 고유구조에 관하여 [DSP 교육]. IEEE Signal Processing Magazine, 28(2), 105-108.
[^7]: Pei, S. C., Ding, J. J., Hsue, W. L., & Chang, K. W. (2008). DFT, 오프셋 DFT 및 기타 주기적 연산을 위한 일반화된 교환 행렬과 그 고유벡터. IEEE Transactions on Signal Pro
[^8]: 다중 각도 중심 이산 분수 푸리에 변환에 관하여
[^9]: Strang, Gilbert. 웨이블릿. (1994년 5–6월)
[^10]: Sahidullah, Md.. 화자 인식을 위한 MFCC의 효율적 계산을 위한 새로운 윈도잉 기법. (2013년 2월)
[^11]: 유한 푸리에 변환
[^12]: 영주파수 성분을 스펙트럼 중심으로 이동 – MATLAB fftshift. The MathWorks, Inc.
[^13]: https://archive.org/details/digitalsignalpro00proa. Prentice-Hall International
[^14]: Oppenheim, Alan V.. 이산 시간 신호 처리. Prentice Hall
[^15]: McGillem, Clare D.. 연속 및 이산 신호와 시스템 분석. Holt, Rinehart and Winston. (1984)
[^16]: Massar, S.. 이산 푸리에 변환에 대한 불확정성 관계
[^17]: DeBrunner, Victor. L^2(\mathbb{R에 대한 엔트로피 기반 불확정성 측도
[^18]: Donoho, D.L.. 불확정성 원리와 신호 복원
[^19]: Santhanam, Balu; Santhanam, Thalanayar S. [https://ieeexplore.ieee.org/document/4217977 "''이산 가우스-에르미트 함수와 중심 이산 푸리에 변환의 고유벡터''"], Proceedings
[^20]: Akansu, Ali N.; Agirman-Tosun, Handan [http://web.njit.edu/~akansu/PAPERS/AkansuIEEE-TSP2010.pdf "''비선형 위상을 갖는 일반화된 이산 푸리에 변환''"], IEEE ''Transactions on Signal Proce
[^21]: cite journal author1=Isabelle Baraquin author2=Nicolas Ratier title=이산 푸리에 변환의 유일성 journal= Signal Processing volume = 209 article-number = 109041
[^22]: Morton, Patrick. 슈어 행렬의 고유벡터에 관하여. (1980)
[^23]: Bose, N. K. "1차원 및 n차원 DFT 행렬의 고유벡터와 고유값." [[AEU — 국제 전자 및 통신 저널]] 55.2 (2001): 131-133.
[^24]: Erseghe, T., & Cariolaro, G. (2003). 높은 대칭성을 갖는 정확하고 단순한 DFT 고유벡터의 정규직교 클래스. IEEE transactions on signal processing, 51(10), 2527-2539.
[^25]: 두 개의 이산 에르미트-가우스 신호의 해석적 표현
관련 인사이트
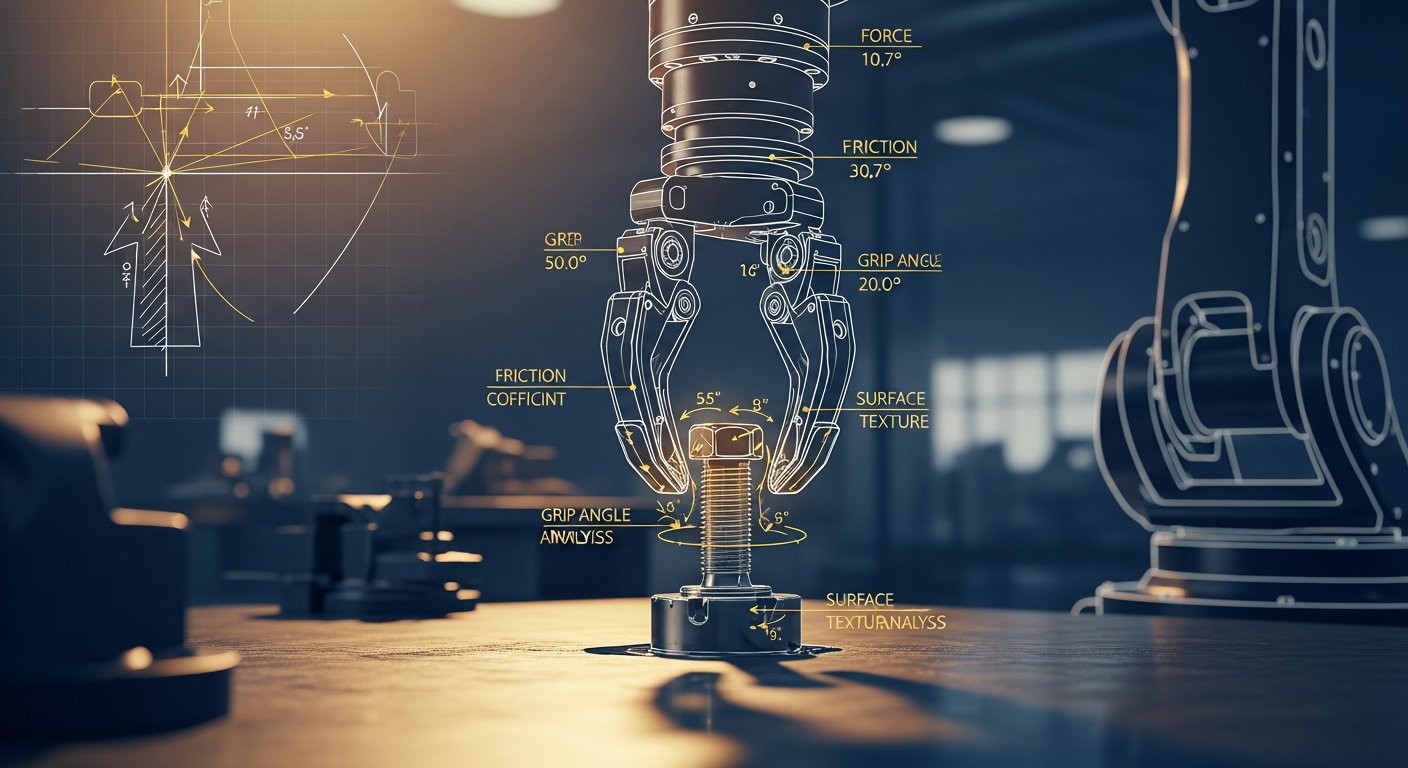
로봇은 왜 볼트를 떨어뜨리는가 — Physical AI가 공장에 필요한 진짜 이유
AI가 데이터 패턴만 외우는 시대는 끝나고 있다. 물리 법칙을 이해하는 Physical AI가 제조 현장에 왜 필요한지, KAIST 교수와 자동차 부품 공장 팀장이 볼트 하나를 놓고 이야기한다.

디지털 트윈, 당신 공장엔 이미 있다 — 엑셀과 MES 사이 어딘가에
디지털 트윈은 10억짜리 3D 시뮬레이션이 아니다. 지금 쓰고 있는 엑셀에 좋은 질문 하나를 더하는 것 — 두 전문가가 중소 제조기업이 이미 가진 데이터로 예측하는 공장을 만드는 현실적 로드맵을 제시한다.
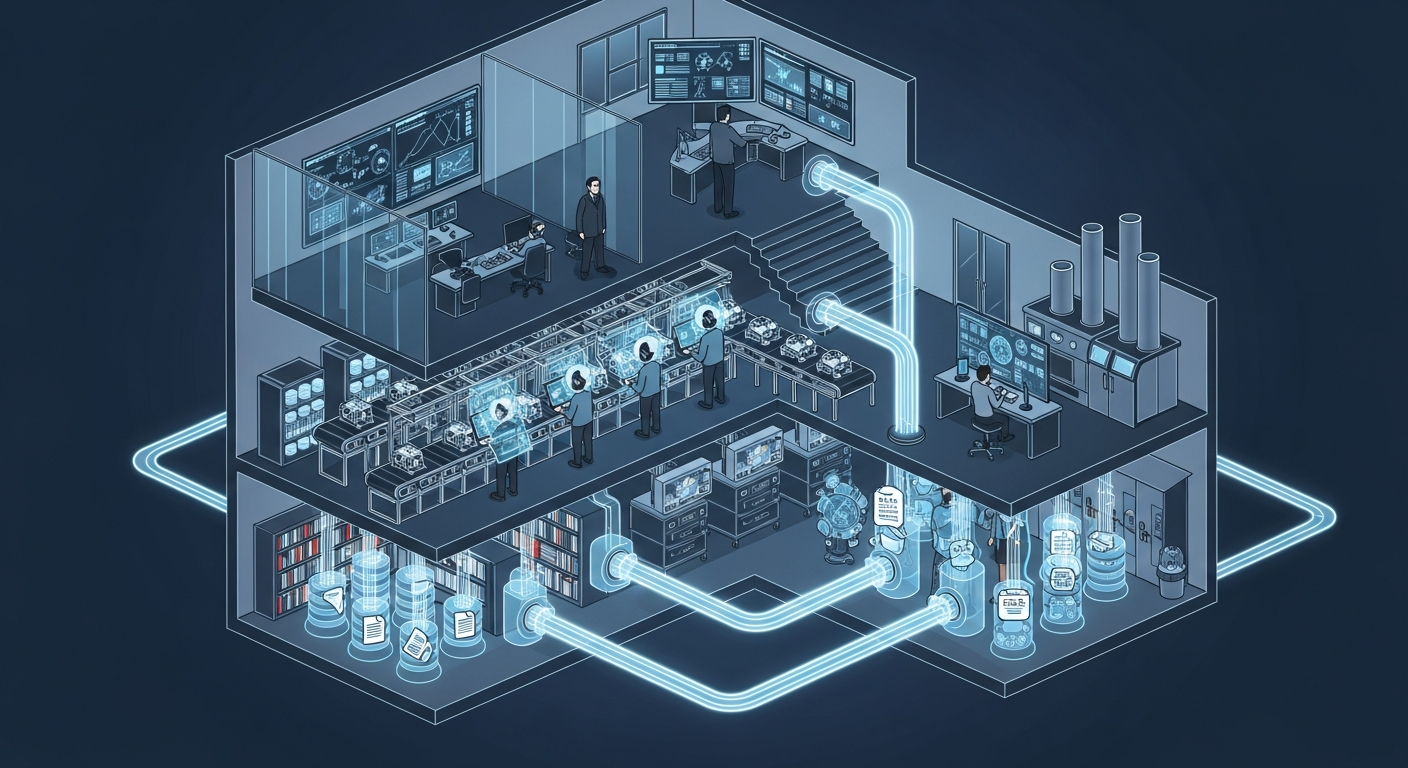
공장의 뇌는 어떻게 생겼는가 — 제조운영 AI 아키텍처 해부
지식관리, 업무자동화, 의사결정지원 — 따로 보면 다 있던 것들입니다. 제조 AI의 진짜 차이는 이 셋이 순환하면서 '우리 공장만의 지능'을 만든다는 데 있습니다.