보드 선도
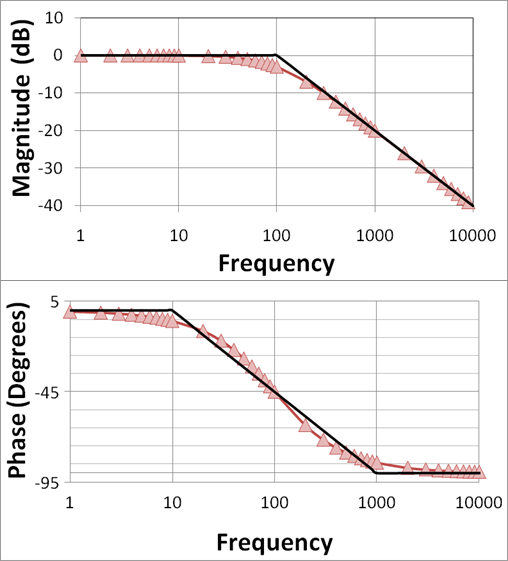
![Figure 1A: [고역통과 필터 (1차, 단극) 보드 크기 선도(위)와 보드 위상 선도(아래). 빨간색 데이터 곡선은 검은색 직선으로 근사된다.]]
{kind=link}
![Figure 1B: [저역통과 필터 (1차, 단극) 보드 크기 선도(위)와 보드 위상 선도(아래). 빨간색 데이터 곡선은 검은색 직선으로 근사된다.]] 전기공학과 제어이론에서 보드 선도(Bode plot)는 시스템의 주파수 응답을 나타낸 그래프이다. 일반적으로 주파수 응답의 크기(보통 데시벨 단위)를 나타내는 보드 크기 선도와 위상 편이를 나타내는 보드 위상 선도의 조합으로 구성된다.
{kind=link}
1930년대에 헨드릭 웨이드 보드가 처음 고안한 이 선도는 직선 구간을 사용하여 주파수 응답을 점근적으로 근사한 것이다.[^1]
개요
회로 이론과 제어 이론에 여러 중요한 공헌을 한 엔지니어 헨드릭 웨이드 보드는 1930년대 벨 연구소에서 근무하면서 이득 및 위상 편이 선도를 그리는 간단하면서도 정확한 방법을 고안하였다. 이 선도들은 그의 이름을 따 보드 이득 선도와 보드 위상 선도라 불린다. "Bode"는 영어에서 흔히 로 발음되지만, 네덜란드어에서는 보통 로 발음되며 이는 영어의 에 가깝다. 그의 가족은 후자의 발음을 선호하지만, 연구자들 사이에서는 덜 일반적이다.[^7]
보드는 전화 네트워크에 사용할 피드백이 있는 안정적인 증폭기를 설계하는 문제에 직면해 있었다. 그는 제조 과정이나 운용 중에 발생하는 회로 특성의 변동 하에서 안정성을 유지하기 위해 필요한 이득 여유와 위상 여유를 보여주기 위한 그래픽 설계 기법으로 보드 선도를 개발하였다.[^8] 이 원리는 서보기구 및 기타 피드백 제어 시스템의 설계 문제에 적용되었다. 보드 선도는 주파수 영역 분석의 한 예이다.
정의
선형 시불변 시스템에서 전달 함수 H(s) (s는 라플라스 영역에서의 복소 주파수)에 대한 보드 선도는 크기 선도와 위상 선도로 구성된다.
보드 크기 선도는 주파수 \omega의 함수인 |H(s=j \omega)|의 그래프이다(j는 허수 단위). 크기 선도의 \omega축은 로그 눈금이며, 크기는 데시벨로 표시된다. 즉, 크기 |H|의 값은 축 위에 20 \log_{10} |H|로 표시된다.
보드 위상 선도는 \omega의 함수로서 편각 함수 \arg \left( H(s =j \omega) \right)의 위상을 나타낸 그래프이며, 일반적으로 도(degree) 단위로 표현된다. 위상은 크기 선도와 동일한 로그 눈금의 \omega축에 표시되지만, 위상 값은 선형 수직축에 표시된다.
주파수 응답
이 절에서는 보드 선도가 시스템의 주파수 응답을 시각화한 것임을 설명한다.
전달 함수 H(s)를 갖는 선형 시불변 시스템을 고려하자. 이 시스템에 주파수 \omega의 정현파 입력이
u(t) = \sin (\omega t),
가해진다고 가정하며, 이 입력은 시간 -\infty에서 시간 t까지 지속적으로 인가된다. 응답은 다음과 같은 형태를 갖는다.
y(t) = y_0 \sin (\omega t + \varphi),
즉, 입력에 대해 위상 \varphi만큼 이동된 진폭 y_0의 정현파 신호이다.
응답의 크기는 다음과 같음을 보일 수 있으며[^2]
위상 편이는 다음과 같다.
요약하면, 주파수 \omega의 입력이 가해질 때 시스템은 동일한 주파수에서 |H(\mathrm{j} \omega)|만큼 증폭되고 \arg H(\mathrm{j} \omega)만큼 위상이 편이된 출력으로 응답한다. 따라서 이러한 양들은 주파수 응답을 특성화하며, 보드 선도에 표시된다.
수작업 보드 선도 작성 규칙
많은 실용적인 문제에서, 상세한 보드 선도는 정확한 응답의 점근선에 해당하는 직선 구간으로 근사할 수 있다. 다중 요소 전달 함수의 각 항의 효과는 보드 선도 위의 직선 집합으로 근사할 수 있다. 이를 통해 전체 주파수 응답 함수의 그래프적 해법이 가능해진다. 디지털 컴퓨터가 널리 보급되기 전에는, 번거로운 계산의 필요성을 줄이기 위해 그래프적 방법이 광범위하게 사용되었으며, 새로운 설계에서 실현 가능한 매개변수 범위를 식별하는 데 그래프적 해법을 활용할 수 있었다.
보드 선도의 전제는 다음과 같은 형태의 함수의 로그를 f(x) = A \prod (x - c_n)^{a_n}
영점과 극점의 로그의 합으로 간주할 수 있다는 것이다: \log(f(x)) = \log(A) + \sum a_n \log(x - c_n).
이 아이디어는 위상 선도를 그리는 방법에서 명시적으로 사용된다. 진폭 선도를 그리는 방법은 이 아이디어를 암묵적으로 사용하지만, 각 극점 또는 영점의 진폭의 로그가 항상 0에서 시작하고 하나의 점근선 변화(직선)만 가지므로, 방법을 단순화할 수 있다.
직선 진폭 선도
진폭 데시벨은 일반적으로 \text{dB} = 20 \log_{10}(X)를 사용하여 데시벨을 정의한다. 다음과 같은 형태의 전달 함수가 주어질 때
H(s) = A \prod \frac{(s - x_n)^{a_n}}{(s - y_n)^{b_n}},
여기서 x_n과 y_n은 상수이고, s = \mathrm{j}\omega, a_n, b_n > 0이며, H는 전달 함수이다:
- \omega = x_n인 s의 모든 값(영점)에서, 직선의 기울기를 10배 주파수당 20 a_n\ \text{dB}만큼 증가시킨다.
- \omega = y_n인 s의 모든 값(극점)에서, 직선의 기울기를 10배 주파수당 20 b_n\ \text{dB}만큼 감소시킨다.
- 그래프의 초기값은 경계 조건에 따라 달라진다. 초기점은 초기 각주파수 \omega를 함수에 대입하여 구한다.
- 초기값에서의 함수의 초기 기울기는 초기값보다 작은 값에 있는 영점과 극점의 수와 차수에 따라 달라지며, 처음 두 규칙을 사용하여 구한다.
기약 2차 다항식을 처리하기 위해, ax^2 + bx + c는 많은 경우 (\sqrt{a}x + \sqrt{c})^2 으로 근사할 수 있다.
영점과 극점은 \omega가 특정 x_n 또는 y_n과 같을 때 발생한다는 점에 유의한다. 이는 해당 함수가 H(\mathrm{j}\omega)의 크기이고, 이것이 복소 함수이므로 |H(\mathrm{j}\omega)| = \sqrt{H \cdot H^*}이기 때문이다. 따라서 (s + x_n) 항을 포함하는 영점 또는 극점이 있는 모든 위치에서, 해당 항의 크기는 \sqrt{(x_n + \mathrm{j}\omega)(x_n - \mathrm{j}\omega)} = \sqrt{x_n^2 + \omega^2}이다.
보정된 진폭 선도
직선 진폭 선도를 보정하려면:
- 모든 영점에서, 직선보다 3 a_n\ \text{dB} 위에 점을 찍는다.
- 모든 극점에서, 직선보다 3 b_n\ \text{dB} 아래에 점을 찍는다.
- 직선을 점근선(곡선이 접근하는 선)으로 사용하여 이 점들을 통과하는 매끄러운 곡선을 그린다.
이 보정 방법은 x_n 또는 y_n의 복소수 값을 처리하는 방법을 포함하지 않는다는 점에 유의한다. 기약 다항식의 경우, 선도를 보정하는 가장 좋은 방법은 기약 다항식에 해당하는 극점 또는 영점에서 전달 함수의 크기를 실제로 계산하고, 해당 극점 또는 영점에서 직선 위 또는 아래에 그 점을 찍는 것이다.
직선 위상 선도
위와 같은 형태의 전달 함수가 주어질 때,
H(s) = A \prod \frac{(s - x_n)^{a_n}}{(s - y_n)^{b_n}},
핵심 아이디어는 각 극점과 영점에 대해 별도의 선도를 그린 다음, 이들을 합산하는 것이다. 실제 위상 곡선은 다음과 같이 주어진다: \varphi(s) = -\arctan \frac{\operatorname{Im}[H(s)]}{\operatorname{Re}[H(s)]}.
위상 선도를 그리려면, 각 극점과 영점에 대해:
- A가 양수이면, 0°에서 (기울기 0인) 직선을 시작한다.
- A가 음수이면, −180°에서 (기울기 0인) 직선을 시작한다.
- 불안정 영점과 극점의 수의 합이 홀수이면, 해당 기준값에 180°를 더한다.
- 모든 \omega = |x_n|(안정 영점 -\operatorname{Re}(z) < 0의 경우)에서, \omega = |x_n|보다 한 디케이드 앞(예: |x_n|/10)에서 시작하여 10배 주파수당 45 a_n도씩 기울기를 증가시킨다.
- 모든 \omega = |y_n|(안정 극점 -\operatorname{Re}(p) < 0의 경우)에서, \omega = |y_n|보다 한 디케이드 앞(예: |y_n|/10)에서 시작하여 10배 주파수당 45 b_n도씩 기울기를 감소시킨다.
- "불안정"(우반면) 극점과 영점(\operatorname{Re}(s) > 0)은 반대의 동작을 보인다.
- 위상이 90 a_n도(영점의 경우) 또는 90 b_n도(극점의 경우)만큼 변했을 때 기울기를 다시 평탄하게 한다.
- 각 극점 또는 영점에 대해 하나의 직선을 그린 후, 이 직선들을 합산하여 최종 위상 선도를 구한다. 즉, 최종 위상 선도는 각 개별 위상 선도의 중첩이다.
예제
1차(단일 극점) 저역통과 필터의 직선 근사 그래프를 작성하려면, 각주파수로 표현된 전달 함수의 정규화된 형태를 고려한다: H_{\text{lp}}(\mathrm{j} \omega) = \frac{1}{1 + \mathrm{j} \frac{\omega}{\omega_\text{c}}}. 보드 선도는 위의 그림 1(b)에 나타나 있으며, 직선 근사의 구성은 다음에서 논의한다.
크기 그래프
위 전달 함수의 크기(데시벨 단위)는 (정규화되고 각주파수 형태로 변환된) 데시벨 이득 표현식 A_\text{vdB}로 주어진다: \begin{align} A_\text{vdB} &= 20 \log|H_{\text{lp}}(\mathrm{j}\omega)| \ &= 20 \log \frac{1}{\left| 1 + \mathrm{j} \frac{\omega}{\omega_\text{c}} \right|} \ &= -20 \log \left| 1 + \mathrm{j} \frac{\omega}{\omega_\text{c}} \right| \ &= -10 \log \left( 1 + \frac{\omega^2}{\omega_\text{c}^2} \right). \end{align} 이를 입력 주파수 \omega에 대해 로그 스케일로 도시하면, 두 개의 직선으로 근사할 수 있으며, 이것이 전달 함수의 점근적(근사) 크기 보드 선도를 형성한다:
- 첫 번째 직선은 \omega_\text{c} 이하의 각주파수에서 0 dB의 수평선이다. 이는 낮은 주파수에서 \omega/\omega_\text{c} 항이 작아 무시할 수 있으므로, 위의 데시벨 이득 방정식이 0이 되기 때문이다.
- 두 번째 직선은 \omega_\text{c} 이상의 각주파수에서 10배 주파수당 −20 dB의 기울기를 가지는 직선이다. 이는 높은 주파수에서 \omega/\omega_\text{c} 항이 지배적이 되어, 위의 데시벨 이득 표현식이 -20 \log(\omega/\omega_\text{c})로 단순화되며, 이는 10배 주파수당 −20 dB의 기울기를 가지는 직선이기 때문이다.
이 두 직선은 차단 주파수 \omega_\text{c}에서 만난다. 그래프에서 알 수 있듯이, 차단 주파수보다 훨씬 낮은 주파수에서 회로의 감쇠는 0 dB로, 이는 단위 통과대역 이득에 해당하며, 즉 필터 출력의 진폭이 입력의 진폭과 같다. 차단 주파수 이상의 주파수는 감쇠되며, 주파수가 높을수록 감쇠가 더 크다.
위상 그래프
위상 보드 선도는 다음으로 주어지는 전달 함수의 위상각을 도시하여 얻는다.
\arg H_{\text{lp}}(\mathrm{j} \omega) = -\tan^{-1}\frac{\omega}{\omega_\text{c}}
이를 \omega에 대해 도시하며, 여기서 \omega와 \omega_\text{c}는 각각 입력 및 차단 각주파수이다. 입력 주파수가 차단 주파수보다 훨씬 낮으면, 비율 \omega/\omega_\text{c}가 작아 위상각은 0에 가깝다. 비율이 증가함에 따라 위상의 절댓값이 증가하며, \omega = \omega_\text{c}일 때 −45°가 된다. 입력 주파수가 차단 주파수보다 훨씬 커져 비율이 계속 증가하면, 위상각은 점근적으로 −90°에 접근한다. 위상 그래프의 주파수 축은 로그 스케일이다.
정규화된 그래프
크기 및 위상 그래프 모두에서 수평 주파수 축은 정규화된(무차원) 주파수 비율 \omega/\omega_\text{c}로 대체할 수 있다. 이 경우 그래프는 정규화되었다고 하며, 모든 입력 주파수가 이제 차단 주파수 \omega_\text{c}의 배수로 표현되므로 주파수의 단위는 더 이상 사용되지 않는다.
영점과 극점이 있는 예제
그림 2–5는 보드 선도의 작성 방법을 추가로 설명한다. 극점과 영점이 모두 있는 이 예제는 중첩의 원리를 사용하는 방법을 보여준다. 먼저 각 구성 요소를 개별적으로 제시한다.
그림 2는 영점과 저역통과 극점에 대한 보드 크기 선도를 보여주며, 이 둘을 보드 직선 근사 선도와 비교한다. 직선 근사 선도는 극점(영점) 위치까지 수평이며, 그 이후 20 dB/decade씩 하강(상승)한다. 그림 3은 위상에 대해 같은 내용을 보여준다. 위상 선도는 극점(영점) 위치보다 10배 낮은 주파수까지 수평이며, 그 이후 극점(영점) 위치보다 10배 높은 주파수에 이를 때까지 45°/decade씩 하강(상승)한다. 그보다 높은 주파수에서는 최종 총 위상 변화 90°에서 다시 수평이 된다.
그림 4와 그림 5는 극점과 영점 선도의 중첩(단순 합산)이 어떻게 이루어지는지를 보여준다. 보드 직선 근사 선도를 다시 정확한 선도와 비교한다. 더 흥미로운 예제를 만들기 위해 영점을 극점보다 높은 주파수로 이동시켰다. 그림 4에서 극점의 20 dB/decade 하강이 영점의 20 dB/decade 상승에 의해 상쇄되어 영점 위치 이상의 주파수에서 크기 선도가 수평이 되는 것을 확인할 수 있다. 그림 5의 위상 선도에서 극점과 영점이 모두 위상에 영향을 미치는 영역에서 직선 근사가 상당히 대략적임을 확인할 수 있다. 또한 그림 5에서 직선 근사 선도의 위상이 변하는 주파수 범위가 극점(영점) 위치의 10배 위와 10배 아래 주파수로 제한되어 있음을 확인할 수 있다. 극점과 영점의 위상이 모두 존재하는 구간에서 직선 근사 위상 선도는 수평인데, 이는 극점의 45°/decade 하강이 둘 다 위상에 기여하는 제한된 주파수 범위에서 영점의 45°/decade 상승과 겹쳐 상쇄되기 때문이다.
A_\text{FB} = \frac{A_\text{OL}}{1 + \beta A_\text{OL}},
여기서 AFB는 궤환이 있는 증폭기의 이득(폐루프 이득)이고, β는 궤환 계수이며, AOL은 궤환이 없는 이득(개루프 이득)이다. 이득 AOL은 크기와 위상을 모두 갖는 주파수의 복소 함수이다. 이 관계식을 살펴보면, 곱 βAOL = −1인 경우(즉, βAOL의 크기가 1이고 위상이 −180°인 경우, 이른바 바르크하우젠 안정도 판별법) 무한대 이득(불안정으로 해석됨)의 가능성이 있음을 알 수 있다. 보드 선도는 증폭기가 이 조건을 얼마나 근접하게 만족하는지 판단하는 데 사용된다.
이 판단의 핵심은 두 개의 주파수이다. 첫 번째는 여기서 f180으로 표기하며, 개루프 이득의 부호가 반전되는 주파수이다. 두 번째는 여기서 f0 dB로 표기하며, 곱의 크기 |βAOL| = 1 = 0 dB가 되는 주파수이다. 즉, 주파수 f180은 다음 조건에 의해 결정된다.
\beta A_\text{OL}(f_{180}) = -|\beta A_\text{OL}(f_{180})| = -|\beta A_\text{OL}|_{180},
여기서 수직 막대는 복소수의 크기를 나타내며, 주파수 f0 dB는 다음 조건에 의해 결정된다.
|\beta A_\text{OL}(f_\text{0 dB})| = 1.
불안정에 대한 근접도의 한 가지 척도는 이득 여유이다. 보드 위상 선도는 βAOL의 위상이 −180°에 도달하는 주파수를 찾으며, 여기서 이를 주파수 f180으로 표기한다. 이 주파수를 사용하여 보드 크기 선도에서 βAOL의 크기를 구한다. |βAOL|180 ≥ 1이면, 앞서 언급한 바와 같이 증폭기는 불안정하다. |βAOL|180 < 1이면 불안정은 발생하지 않으며, |βAOL|180의 크기와 |βAOL| = 1 사이의 dB 단위 차이를 이득 여유라 한다. 크기 1은 0 dB이므로, 이득 여유는 단순히 다음과 같은 동치 형태 중 하나이다: 20 \log_{10} |\beta A_\text{OL}|{180} = 20 \log{10} |A_\text{OL}| - 20 \log_{10} \beta^{-1}.
불안정에 대한 근접도의 또 다른 동치 척도는 위상 여유이다. 보드 크기 선도는 |βAOL|의 크기가 1에 도달하는 주파수를 찾으며, 여기서 이를 주파수 f0 dB로 표기한다. 이 주파수를 사용하여 보드 위상 선도에서 βAOL의 위상을 구한다. βAOL(f0 dB)의 위상이 −180°보다 크면, 어떤 주파수에서도 불안정 조건을 만족할 수 없으며(그 크기가 f = f180일 때 1보다 작아지기 때문), f0 dB에서의 위상이 −180°보다 위에 있는 각도 거리를 위상 여유라 한다.
안정성 문제에 대해 단순한 예 또는 아니오만 필요하다면, f0 dB < f180일 때 증폭기는 안정하다. 이 판별법은 극점과 영점의 위치에 대한 일정한 제한 조건(최소 위상 시스템)을 만족하는 증폭기에 대해서만 안정성을 예측하기에 충분하다. 이러한 제한 조건은 보통 충족되지만, 그렇지 않은 경우에는 나이퀴스트 선도와 같은 다른 방법을 사용해야 한다.[^3][^4] 최적의 이득 여유와 위상 여유는 네반린나-픽 보간 이론을 사용하여 계산할 수 있다.[^5]
보드 선도를 이용한 예제
그림 6과 7은 이득 거동과 용어를 설명한다. 3극점 증폭기에 대해, 그림 6은 궤환이 없는 이득(개루프 이득) AOL의 보드 선도를 궤환이 있는 이득 AFB(폐루프 이득)와 비교한다. 더 자세한 내용은 부궤환 증폭기를 참조하라.
이 예에서, 저주파에서 AOL = 100 dB이고, 1 / β = 58 dB이다. 저주파에서 AFB ≈ 58 dB이기도 하다.
개루프 이득 AOL이 도시되고 곱 β AOL이 아니므로, AOL = 1 / β 조건이 f0 dB를 결정한다. 저주파에서 그리고 큰 AOL에 대해 궤환 이득은 AFB ≈ 1 / β이므로(큰 이득 AOL의 경우에 대해 이 절의 처음에 있는 궤환 이득 공식을 참조), f0 dB를 찾는 동등한 방법은 궤환 이득이 개루프 이득과 교차하는 점을 찾는 것이다. (주파수 f0 dB는 나중에 위상 여유를 구하는 데 필요하다.)
f0 dB에서 두 이득이 교차하는 근처에서, 이 예에서는 바르크하우젠 판별 기준이 거의 만족되며, 궤환 증폭기는 이득에서 큰 첨두값을 나타낸다(β AOL = −1이면 무한대가 될 것이다). 단위 이득 주파수 f0 dB를 넘어서면, 개루프 이득이 충분히 작아져서 AFB ≈ AOL이 된다(작은 AOL의 경우에 대해 이 절의 처음에 있는 공식을 살펴보라).
그림 7은 대응하는 위상 비교를 보여준다: 궤환 증폭기의 위상은 개루프 이득의 위상이 −180°인 주파수 f180까지 거의 0이다. 이 부근에서 궤환 증폭기의 위상은 급격히 아래로 떨어져 개루프 증폭기의 위상과 거의 같아진다. (작은 AOL에 대해 AFB ≈ AOL임을 상기하라.)
그림 6과 그림 7에서 표시된 점들을 비교하면, 이 증폭기에서 단위 이득 주파수 f0 dB와 위상 반전 주파수 f180이 매우 거의 같으며, f180 ≈ f0 dB ≈ 3.332 kHz임을 알 수 있고, 이는 이득 여유와 위상 여유가 거의 0임을 의미한다. 이 증폭기는 경계 안정 상태이다.
그림 8과 9는 다른 양의 궤환 β에 대한 이득 여유와 위상 여유를 보여준다. 궤환 계수는 그림 6 또는 7에서보다 작게 선택되어, | β AOL | = 1 조건을 더 낮은 주파수로 이동시킨다. 이 예에서, 1 / β = 77 dB이고, 저주파에서 AFB ≈ 77 dB이기도 하다.
그림 8은 이득 선도를 보여준다. 그림 8에서, 1 / β와 AOL의 교차점은 f0 dB = 1 kHz에서 발생한다. f0 dB 근처에서 이득 AFB의 첨두값이 거의 사라졌음에 주목하라.[^6]
그림 9는 위상 선도이다. 그림 8의 크기 선도에서 위에서 구한 f0 dB = 1 kHz 값을 사용하면, f0 dB에서의 개루프 위상은 −135°이며, 이는 −180° 위로 45°의 위상 여유에 해당한다.
그림 9를 사용하면, −180°의 위상에 대해 f180 = 3.332 kHz의 값을 얻는다(물론 앞서 구한 것과 같은 결과이다). 그림 8에서 f180에서의 개루프 이득은 58 dB이고, 1 / β = 77 dB이므로, 이득 여유는 19 dB이다.
안정성만이 증폭기 응답의 유일한 기준은 아니며, 많은 응용에서 안정성보다 더 엄격한 요구 사항은 양호한 계단 응답이다. 경험적으로, 양호한 계단 응답은 최소 45°의 위상 여유를 요구하며, 특히 제조 공차로 인한 부품 변동이 문제가 되는 경우에는 종종 70° 이상의 여유가 권장된다.[^6] 계단 응답 문서에서의 위상 여유 논의도 참조하라.
이는 벡터 네트워크 분석기가 수행하는 기능과 동일하지만, 네트워크 분석기는 일반적으로 훨씬 더 높은 주파수에서 사용된다.
교육 및 연구 목적으로, 주어진 전달 함수에 대한 보드 선도를 그리면 더 나은 이해와 빠른 결과 도출에 도움이 된다(외부 링크 참조).
관련 도표
동일한 데이터를 다른 좌표계에서 표시하는 두 가지 관련 도표로 나이퀴스트 선도와 니콜스 선도가 있다. 이들은 주파수를 입력으로, 주파수 응답의 크기와 위상을 출력으로 하는 매개변수 도표이다. 나이퀴스트 선도는 이를 극좌표로 표시하며, 크기는 반지름에, 위상은 편각(각도)에 대응된다. 니콜스 선도는 이를 로그 스케일의 직교 좌표로 표시한다. Image:Nyquist plot.svg|그림 11: 나이퀴스트 선도. Image:Nichols plot.svg|그림 12: 그림 11과 동일한 응답의 니콜스 선도.
같이 보기
- 아날로그 신호 처리
- 위상 여유
- 보드의 감도 적분
- 보드의 크기(이득)–위상 관계
- 유전체 분광법
각주
외부 링크
- 구간별 점근 보드 선도 그리는 방법
- 보드 선도 생성을 위한 Gnuplot 코드: DIN-A4 인쇄 템플릿 (pdf)
참고 문헌
[^1]: 아날로그 및 디지털 신호와 시스템. Springer Science & Business Media
[^2]: Skogestad, Sigurd. 다변수 피드백 제어. John Wiley & Sons, Ltd.. (2005)
[^3]: CMOS 무선 주파수 집적 회로의 설계. Cambridge University Press
[^4]: 제어 핸드북: 전기공학 핸드북 시리즈. CRC Press/IEEE Press
[^5]: 불변성과 시스템 이론: 대수적 및 기하학적 측면. Springer-Verlag
[^6]: 아날로그 설계 핵심. Springer
[^7]: Vertaling van postbode, NL>EN. mijnwoordenboek.nl
[^8]: David A. Mindell ''인간과 기계 사이에서: 사이버네틱스 이전의 피드백, 제어, 그리고 컴퓨팅'' JHU Press, 2004, ISBN 0801880572 , pp. 127–131.
관련 인사이트

디지털 트윈, 당신 공장엔 이미 있다 — 엑셀과 MES 사이 어딘가에
디지털 트윈은 10억짜리 3D 시뮬레이션이 아니다. 지금 쓰고 있는 엑셀에 좋은 질문 하나를 더하는 것 — 두 전문가가 중소 제조기업이 이미 가진 데이터로 예측하는 공장을 만드는 현실적 로드맵을 제시한다.
공장의 뇌는 어떻게 생겼는가 — 제조운영 AI 아키텍처 해부
지식관리, 업무자동화, 의사결정지원 — 따로 보면 다 있던 것들입니다. 제조 AI의 진짜 차이는 이 셋이 순환하면서 '우리 공장만의 지능'을 만든다는 데 있습니다.

그 30분을 18년 동안 매일 반복했습니다 — 품질팀장이 본 AI Agent
18년차 품질팀장이 매일 아침 30분씩 반복하던 데이터 분석을 AI Agent가 3분 만에 해냈습니다. 챗봇과는 완전히 다른 물건 — 직접 시스템에 접근해서 데이터를 꺼내고 분석하는 AI의 현장 도입기.